











ROS×ラズパイ SLAMロボット入門
地図作成ロボットの起動バッチ・プログラム
ROS×ラズパイで始めるSLAMロボット入門
 |
|---|
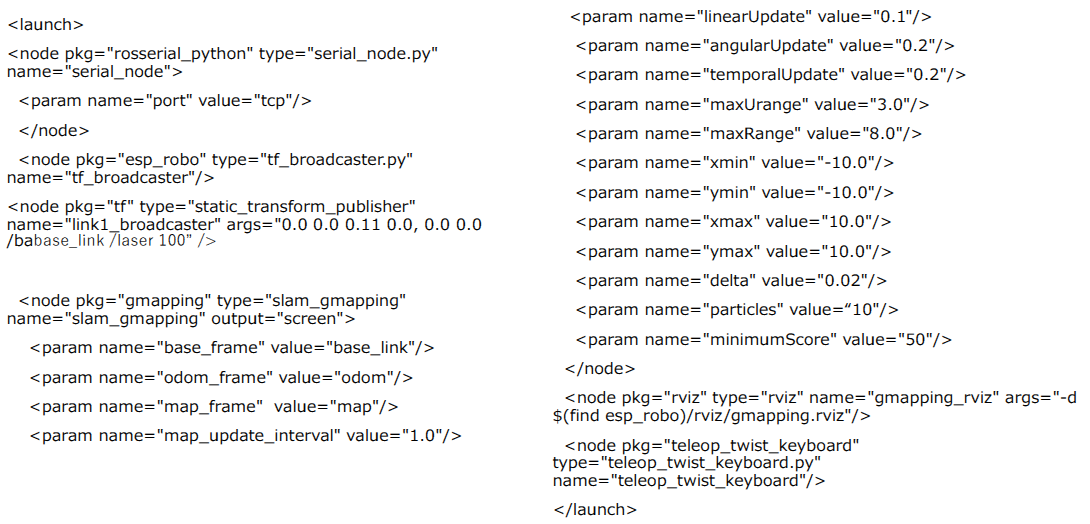
| 図1 ROSの複数のアプリケーションを自動で起動・管理するLaunchファイルを用意して複数のノードをまとめて起動することで,SLAMロボットは短時間で地図作成や自己推定を開始できる.画像クリックで動画を見る.または記事を読む.[提供・著]砂川 寛行 |
ROSとラズパイの組み合わせが生む可能性
ROS(Robot Operating System)はロボット制御に特化したオープンソースのミドルウェアです.その強力な点は,制御用ライブラリや通信機能,さらに多数のセンサとの互換性を提供することにあります.特に,複数のノードを複数のコンピュータで並列に動作させるしくみは,処理負荷の分散を可能にし,スケーラブルなロボット・システム構築に寄与します.
ラズベリー・パイはその手軽さと拡張性から,ロボット開発においても人気のあるプラットフォームです.低消費電力かつコンパクトであるため,モバイル・ロボットの制御コンピュータとして最適です.これらを組み合わせることで,クローラ・ロボットの駆動制御,カメラ画像解析,位置推定などを分担して処理する柔軟なシステムを構築できます.
SLAMとLiDARを用いた地図作成の基本
SLAM(Simultaneous Localization and Mapping)は,ロボットが未知の環境で自己位置を推定しつつ地図を作成する技術です.ROSでは,LiDARセンサと「gmapping」パッケージを使用することでSLAMを実現できます.LiDARは高精度な距離情報を取得するデバイスで,ロボットの位置推定と環境マッピングに不可欠な役割を果たします.
以下のような設定でSLAMを効率的に行えます.
- 地図更新周期:1秒(`map_update_interval=1.0`)
- 線形移動更新間隔:0.1m(`linearUpdate=0.1`)
- 回転移動更新間隔:0.2rad(`angularUpdate=0.2`)
これらの設定値を調整することで,ロボットの移動特性に応じた最適なマッピングが可能になります.
全アプリ自動起動の利便性
SLAMやそのほかの制御プログラムを効率的に運用するには,複数のアプリケーションを自動で起動・管理するしくみが重要です.ROSではLaunchファイルを用いることで,複数のノードをまとめて起動できます.たとえば,以下のように設定することで,一括起動が可能です.
バッチ・スクリプトやシェル・スクリプトを利用すれば,ラズベリー・パイの起動時にこれらのLaunchファイルを自動実行することも可能です.
<;launch>;
<;node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen"/>;
<;node pkg="rviz" type="rviz" name="gmapping_rviz"/>;
<;/launch>;
SLAMとLiDARの重要性
核となるしくみ
SLAMは,ロボット工学の分野で特に注目される技術です.その理由は,未知環境におけるロボットの自律移動を可能にするためです.ロボットが自己位置を推定しながら周囲の地図を生成するこのプロセスには,計算機科学,信号処理,ロボティクスの知識が結集されています.特に,ROSが提供するgmappingパッケージは,粒子フィルタベースのアルゴリズムを使用してSLAMを実現しており,効率的かつ高精度な地図作成をサポートします.
LiDARがもたらす精度の向上
LiDAR(Light Detection and Ranging)は,SLAMを支える主要なセンサ技術です.光を用いて対象物までの距離を高精度に計測するこのデバイスは,ロボットが環境を詳細に把握することを可能にします.LiDARの有効範囲をROSで設定する際,`maxUrange`や`maxRange`といったパラメータが重要な役割を果たします.これにより,近距離から遠距離まで幅広い距離に対応できる柔軟なSLAMシステムが構築可能です.
LiDARのデータは時間的に連続したものとして処理されるため,ロボットの動きに応じたリアルタイム地図更新が可能になります.この特性は,動的環境での自律移動において特に有用です.〈著:ZEPマガジン〉
著者紹介
- 1994年 事務機器メーカ入社.エレクトロニクス関連の開発と設計.2016年 CQ出版社 トランジスタ技術にマイコンやロボット関連の技術解説記事を寄稿.Maker Fair Tokyoに出展.マイコン4足歩行ロボット製作キット「クワッドクローラ」を開発.ESP32を使用した小型のSLAMロボットを開発2022年 ZEPエンジニアリング社にて,キット付きウェブセミナ [VOD/Pi4 KIT] SLAMロボット&ラズパイ付き!ROSプログラミング超入門」の講師を行う
著書
- [VOD/KIT]SLAMロボット付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- 5ドルI/Oコンピュータ「ラズパイZero」の研究,トランジスタ技術2016年3月号,CQ出版社.
- 付録Xホビー・スパコンで科学の実験 プロローグ~第3章,トランジスタ技術2016年8月号,CQ出版社.
- 全実験室に!高IQアルディーノ基板(記事および付録基板設計),トランジスタ技術2017年2月号,CQ出版社.
- トラ技ポケコン「I/OSOLDIER」の製作,トランジスタ技術2018年2月号,CQ出版社.
- LiDARで自己位置推定!1万円自立移動ロボット「PiBoT」,トランジスタ技術2019年10月号から隔月連載,CQ出版社.
- スピード製作!初歩の遠隔制御ロボット,トランジスタ技術2020年12月号,CQ出版社.
参考文献
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズパイ×Node-REDで作ろう!IoTアプリ開発入門,ZEPエンジニアリング株式会社.
- [VOD/Pi3A KIT]ラズパイ・キットで学ぶLinux I/Oボードの作り方・探し方・動かし方,ZEPエンジニアリング株式会社.