[VOD/Semi KIT/data]
3D LiDAR×Jetson Superキットで学ぶ
高精度リアルタイムSLAM&センサ・フュージョン
点群スキャン・マッチングからグラフベース最適化,SLAMフレームワークGLIMの使用方法まで
- 型名:z-haslam-on2
- 仕様:3D LiDARキット,講義425分,解説294頁,実習・開発用ソースコード
- 定価:173,800円(税込・送料無料)
- 著者・講師:小出 健司
- 企画編集: ZEPエンジニアリング株式会社
- 1人当たり1ライセンスです
- 関連製品:[VOD/Full KIT/data]3D LiDAR×Jetson Superキットで学ぶ高精度リアルタイムSLAM&センサ・フュージョン
- 関連製品:[VOD/data]3D LiDAR×Jetson Superキットで学ぶ高精度リアルタイムSLAM&センサ・フュージョン
本製品に付属の実習キット
- 3D LiDARモジュール:
3D LiDAR Livox MID360[水平視野角360°,垂直視野角-7°~52°,測距範囲10cm~70m(反射率10%で40m,80%で70m), 点群密度20万点/秒, IMU内蔵, 265g]&3線式航空コネクタ - 電源・ケーブル類:
・Livox用電源ケーブル (USB-C -> DC12V)
※ケーブル加工済 ・USB-C PD対応電源
・電源3ピン→2ピン変換プラグ - 実習環境ストレージ:
実習環境設定済みNVME SSD 512GB

|
|---|
| 写真1 実習キットを活用し,点群スキャン・マッチングからファクタ・グラフ最適化によるセンサ・フュージョンまでを体系的に学ぶ |
製品別の配布内容と受講対象
-
(1)フルキット実習([VOD/Full KIT/data]版) 225,500円(税込)
- 本講義で使用する実習キットに記載されたすべての部材を送付
- Jetson Superキットや3D LiDARを実際に動かし,高精度リアルタイムSLAMやマッピングを体験したい方
- はんだ付けや環境セットアップが完了したキットで,すぐに実習・実験を始めたい方
-
(2)セミキット実習(本製品) 173,800円(税込)
- 部材はJetson Orin Nano Super開発者キットを除いて送付(前述の1~3の部材を送付)
- Jetson Orin Nano Super開発者キット相当品をお持ちの方
- 3D LiDARを実際に動かし,高精度リアルタイムSLAMやマッピングを体験したい方
-
(3)データ実習([VOD/data]版) 37,950円(税込)
- 設定スクリプト&サンプル・データを提供
- Jetson Orin Nanoキットや3D LiDARが手元になくてもアルゴリズム学習やGLIMによるマッピングを体験したい方,または部材を自分で用意して環境をセットアップできる方
- Ubuntu PCとNVIDIA GPU環境(RTX 1660 Ti以上、GPUメモリ6GB以上推奨)で,rosbag再生を通じてGLIMマッピングを学習したい方.Ubuntu PC + NVIDIA GPUがあればフル性能で実行可能
- GPUがない場合でもCPUによる限定機能版で学習可能
概要
3次元LiDARは,レーザ測距によってリアルタイムの3次元構造を計測できるセンサです.自動運転車両やサービス・ロボットなどに広く使用されています.特にLiDARを使用した3次元点群SLAM(自己位置推定・環境地図生成)技術は,あらゆる自律システムの開発に欠かせません.
本製品では,3次元点群SLAMについて,最も基礎となるICP(Iterative Closest Point)スキャン・マッチングからファクタ・グラフ最適化による実践的センサ・フュージョンまで体系的に学びます.
座学での理論学習と合わせて,キットに含まれる3D LiDARを使った点群処理の実装実習と,SLAMフレームワーク(GLIM)の体験を通して実践的な技術を習得します.キットにはデータ(ROS2 bag)記録スクリプトなども同梱するため,LiDARを使った研究開発にそのまま役立てることができます.LiDAR SLAM関連技術についての最新の動向にも触れます.
キットに加え,7時間を超えるプロの技術者による丁寧な解説動画と,294頁の講義キスト,実習用ソースが同梱されています.
同梱の説明書(下記)には,講義動画やテキストの視聴を可能にするパスワードが記載されています.
本製品のすべての映像,画像,文書テキスト,ソースコードは著作権法によって厳格に守られています.無許可の転載,複製,転用は法律により罰せられます.
| 動画1 実習内容の紹介 |
|
|---|
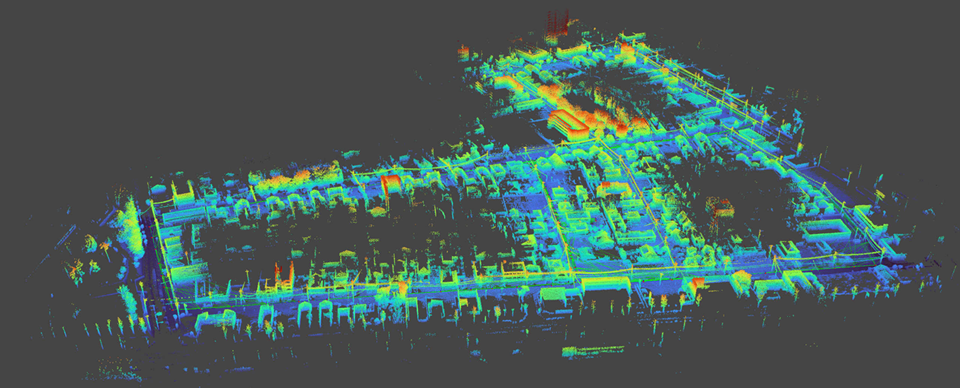
| 図1 広域環境の3D LiDAR点群マッピング例 |
|
|---|
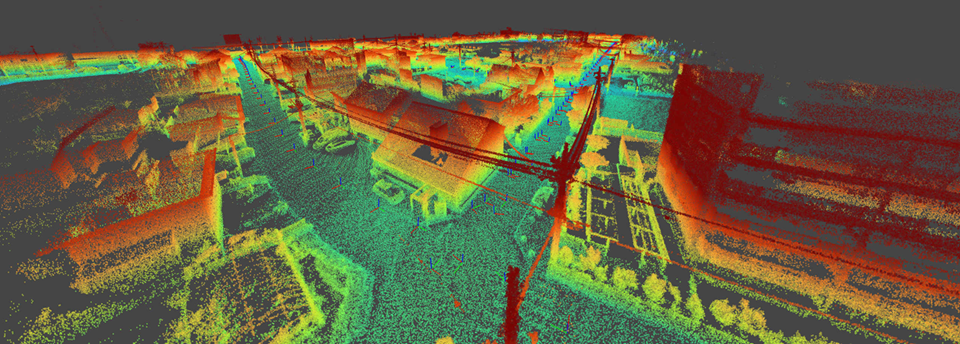
| 図2 高密度LiDAR点群によるインフラ詳細マッピング例 |
アジェンダ
- 実習の準備
- イントロダクション
- 本日の流れ
- 教材キットについて
- GLIMチュートリアル
- 点群SLAMとは
- 点群レジストレーション
- 姿勢表現について
- Iterative Closest Point (ICP)
- 点群数値間の重なり具合を定義する誤差関数(ICP誤差関数)/実装チュートリアル
- 姿勢の数値最適化を可能にするマニフォールド空間とExponential map/実装チュートリアル
- 誤差関数を最小化するための最適化アルゴリズム(ガウスニュートン法)/実装チュートリアル
- 落穂ひろい:ダウンサンプリング/最近傍探索/ICP誤差関数
- オドメトリ推定
- 現代的なSLAMシステムの基本構成
- スキャン・マッチングによるオドメトリ推定/実装チュートリアル
- キーフレームベース・オドメトリ/実装チュートリアル
- 実装したオドメトリの課題
- Frame-to-Modelマッチング
- IMUフュージョン
- センサ・フュージョン方式
- 点群歪み補正
- 大域軌跡最適化とファクタ・グラフ
- 大域軌跡最適化
- ファクタ・グラフ最適化
- 相対姿勢制約を使ったポーズ・グラフ最適化
- ノイズ・モデルとロバスト・カーネル
- GTSAMを使った実装
- カスタム・ファクタ/実装チュートリアル
- GLIM:Versatile and Extensible Point Cloud-based SLAM Framework
- 点群レジストレーション・ファクタを多用した高精度・高信頼な状態推定
- スライディング・ウィンドウ最適化によるオドメトリ推定
- 大域マルチスキャン・レジストレーションによる大域最適化
- 汎用性・柔軟性を引き出すためのフレームワーク設計
- センサ・モデルに依存しない汎用点群処理
- 状態推定手法を切り替え可能なモジュラー設計
- ファクタ・グラフの柔軟性を引き出す拡張モジュール
- 点群レジストレーション・ファクタを多用した高精度・高信頼な状態推定
- 発展的トピック
- LiDAR SLAMの最新動向
- ファクタ・グラフの発展的解法
- 大域軌跡最適化
- 大域点群レジストレーションの最新動向
- 再探訪検知
- 特徴的マッチング
- 直接点群マッチング
- ノンパラメトリック状態の最新動向
- その他の研究動向
- LiDAR SLAMの最新動向
| ICP(terative Closest Point)チュートリアル:点群対応付けと誤差の可視化 | 地図の精度を高める点群歪み補正 | ダウンサンプリングによる高速・高精度点群処理 |
|---|
| ファクタ・グラフ最適化の基本概念と利点 | GLIMで実現するロバストなセンサ・フュージョンと最適化 |
|---|
受講対象
- ロボットなどの環境を認識して自律で動くシステムに興味がある技術者・学生
- 点群を使った状態推定の理論を勉強し,実際に実装して動かしてみたい方
あると望ましい予備知識
- C++とPythonによる小規模なプログラミング経験
- ROS2のセットアップやノード起動などの基礎知識
講演の目標
- 点群SLAMの基礎から応用の理論と実装を習得する
実習に必要な周辺環境
- Jetson Superキットと配布された実習キット(実習環境セットアップ済み)
- DisplayPort 接続対応のモニタ,DisplayPort ケーブル
※HDMI端子のみのモニタを使用する場合は,DisplayPort to HDMI変換アダプタなどをご用意ください. - キーボード,マウス
本製品を購入された方へ
講義ビデオと講義テキストの視聴方法は,下記リンク先(青字)をクリックし,本製品同梱の説明書に書かれたパスワードを入力してください.
425分の講義ビデオ(著作権保護のためパスワードがかけられています)
『3D LiDAR×Jetson Superキットで学ぶ 高精度リアルタイムSLAM&センサ・フュージョン』講義動画.mp4
- 0:00:10 (0) 実習の準備
- 0:04:34 (1) イントロダクション:講義の流れ / 教材キット / GLIMチュートリアル / 点群SLAMとは
- 1:05:45 (2) 点群レジストレーション
- 3:09:43 (3) オドメトリ推定
- 4:11:04 (4) 大域軌跡最適化とファクタグラフ
- 5:31:19 (5) 3D LiDAR-IMU SLAM フレームワーク (GLIM) の利用
- 6:16:05 (6) 発展的トピック
講義テキスト(著作権保護のためパスワードがかけられています)
実習・開発用ソースコード(著作権保護のためパスワードがかけられています)
-
seminar.tar.gz
環境構築用のスクリプト(setupフォルダ内のreadmeを参照) -
seminar_data.tar.gz
実習用のrosbag形式データ(展開後seminar_dataフォルダがあればOK)
※本製品では,上記のスクリプトとデータをセットアップ済のため,作業は不要です.
講師紹介
略歴
豊橋技術科学大学で博士課程修了後,イタリア・パドヴァ大学での勤務を経て,現在は産業技術総合研究所で主任研究員を務める.
点群自己位置推定・環境地図生成を中心に,移動ロボットの環境認識・行動計画に関わる研究開発に従事する.
主な著書
- Koide et al., GLIM: 3D Range-Inertial Localization and Mapping with GPU-Accelerated Scan Matching Factors, Robotics and Autonomous Systems, Vol. 179, pp. 104750, 2024
- Koide et al., Globally Consistent 3D LiDAR Mapping with GPU-accelerated GICP Matching Cost Factors, IEEE Robotics and Automation Letters, Vol. 6, Issue. 4, pp. 8591-8598, Oct., 2021
- Koide., small_gicp: Efficient and parallel algorithms for point cloud registration, The Journal of Open Source Software, Vol. 9, pp. 6948, 2024
受賞歴
- 第30回 ロボティクスシンポジア 最優秀賞, Mar., 2025
- 第27回 ロボティクスシンポジア最優秀賞, Mar., 2022
- 計測自動制御学会SI部門 若手奨励賞, Dec., 2024
- IEEE Robotics and Automation Letters Outstanding Reviewer, May, 2023
- SICE International Young Authors Award for IROS2022, Oct., 2022
参考URL
- 教材コード:"gtsam_points : A collection of GTSAM factors and optimizers for point cloud SLAM", https://github.com/koide3/gtsam_points
- 教材コード:"GLIM : Versatile and Extensible Range-based 3D Localization and Mapping Framework", https://github.com/koide3/glim
関連製品
- [VOD/Pi4 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門
- [VOD/KIT]RTKポータブル・センチメートル測位キット
- [VOD/KIT]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門