3D LiDAR×Jetson Superキットで学ぶ
高精度リアルタイムSLAM&センサ・フュージョン
点群スキャン・マッチングからグラフベース最適化,SLAMフレームワークGLIMの使用方法まで
(講義425分/解説294頁)
- 講師:著者:小出 健司
- 企画編集・主催:ZEPエンジニアリング株式会社
お申し込み
下記のボタンをクリックし,必要事項の入力をお願いいたします.
本セミナのお申込み前にご理解いただきたいこと
- 本VODは,2025年5月17日に実施したセミナを録画して編集した動画です.繰り返し再生,一時停止,巻き戻しが可能です.
- 会社・教育機関等で請求書払いをご希望の場合は,銀行振込で手続きを行った後,弊社までご連絡ください.
※弊社の支払い条件:納品月末締め・翌月末現金払い - 後述の部材をご自身で準備可能な方,またはキットが手元になくてもアルゴリズム学習やGLIMによるマッピングを体験したい方は,[VOD/data]版がおすすめです.
- セミナの映像,画像,文書テキスト,ソースコードは,著作権法により厳格に保護されています.無許可の転載,複製,転用は禁止されており,法律により罰せられる場合があります.
本講義で配布する実習キット
- 計算ユニット:
Jetson Orin Nano Super開発者キット(6コアCPU[最大1.7GHz],1024CUDA,67TOPS,8GB LPDDR5,7W-25W)
- 3D LiDARモジュール:
3D LiDAR Livox MID360[水平視野角360°,垂直視野角-7°~52°,測距範囲10cm~70m(反射率10%で40m,80%で70m), 点群密度20万点/秒, IMU内蔵, 265g]&3線式航空コネクタ - 電源・ケーブル類:
・Livox用電源ケーブル (USB-C -> DC12V)
・USB-C PD対応電源
・電源3ピン→2ピン変換プラグ - 実習環境ストレージ:
実習環境設定済みNVME SSD 512GB
コース別の配布内容と受講対象
-
[VOD/Full KIT/data]版:フルキット実習(上記すべての部材を送付)
- Jetson Orin Nanoキットや3D LiDARを実際に動かし,高精度リアルタイムSLAMやマッピングを体験したい方
- はんだ付けや環境セットアップが完了したキットで,すぐに実習・実験を始めたい方
-
[VOD/Semi KIT/data]版:セミキット実習(Jetson Orin Nano Super開発者キット以外の部材を送付)
- Jetson Orin Nano Super開発者キット相当品をお持ちの方
- 実習キットを実際に動かし,高精度リアルタイムSLAMやマッピングを体験したい方
-
[VOD/data]版:データ実習(設定スクリプト&サンプル・データを送付)
- Jetson Orin Nanoキットや3D LiDARが手元になくてもアルゴリズム学習やGLIMによるマッピングを体験したい方,またはこれらの部材をご自身で準備可能な方
- Ubuntu PCとNVIDIA GPU環境で,rosbag再生を通じてGLIMマッピングを学習したい方
※NVIDIA GPU(RTX 1660 Ti相当以上,GPUメモリ6GB以上推奨)を搭載したデスクトップPCがあれば,フル性能での実行が可能.GPUがない場合でも,CPUによる限定機能版での学習が可能.
※本コースでは,提供するスクリプト等を用いて,受講者ご自身で環境をセットアップしていただく形となります.

|
|---|
| 写真1 実習キットを活用し,点群スキャン・マッチングからファクタ・グラフ最適化によるセンサ・フュージョンまでを体系的に学ぶ |
学ぶこと
あらまし
3次元LiDARは,レーザ測距によってリアルタイムの3次元構造を計測できるセンサです.自動運転車両やサービス・ロボットなどに広く使用されています.特にLiDARを使用した3次元点群SLAM(自己位置推定・環境地図生成)技術は,あらゆる自律システムの開発に欠かせません.
本セミナでは,3次元点群SLAMについて,最も基礎となるICP(Iterative Closest Point)スキャン・マッチングからファクタ・グラフ最適化による実践的センサ・フュージョンまで体系的に学びます.
座学での理論学習と合わせて,キットに含まれる3D LiDARを使った点群処理の実装実習と,SLAMフレームワーク(GLIM)の体験を通して実践的な技術を習得します.キットにはデータ(ROS2 bag)記録スクリプトなども同梱するため,LiDARを使った研究開発にそのまま役立てることができます.LiDAR SLAM関連技術についての最新の動向にも触れます.
|
|---|
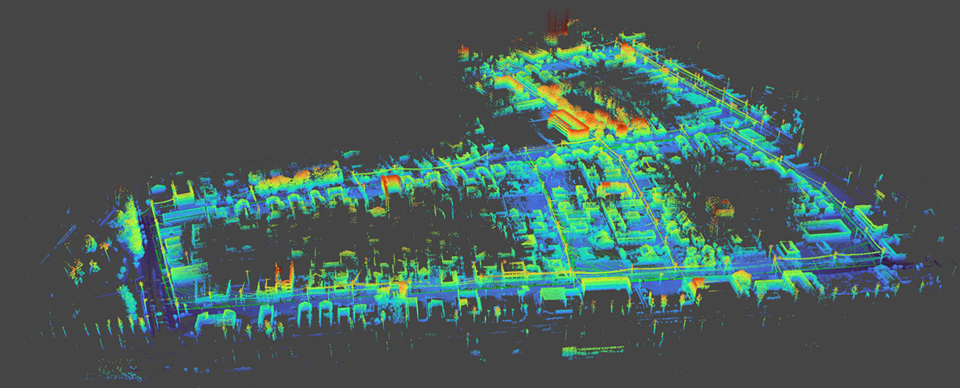
| 図1 広域環境の3D LiDAR点群マッピング例 |
|
|---|
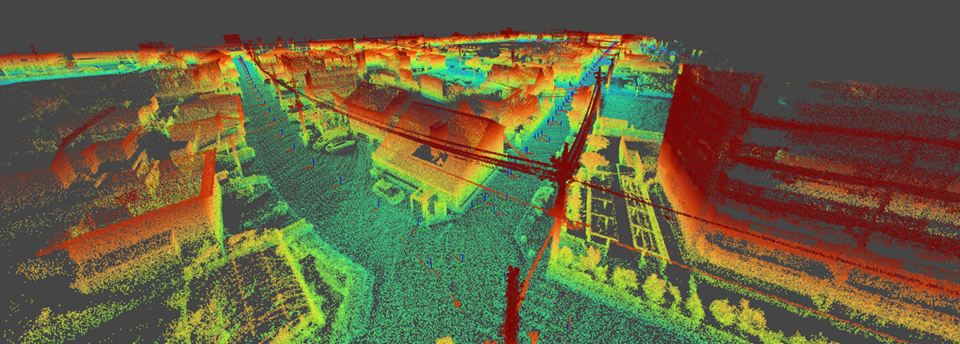
| 図2 高密度LiDAR点群によるインフラ詳細マッピング例 |
アジェンダ
- 実習の準備
- イントロダクション
- 本日の流れ
- 教材キットについて
- GLIMチュートリアル
- 点群SLAMとは
- 点群レジストレーション
- 姿勢表現について
- Iterative Closest Point (ICP)
- 点群数値間の重なり具合を定義する誤差関数(ICP誤差関数)/実装チュートリアル
- 姿勢の数値最適化を可能にするマニフォールド空間とExponential map/実装チュートリアル
- 誤差関数を最小化するための最適化アルゴリズム(ガウスニュートン法)/実装チュートリアル
- 落穂ひろい:ダウンサンプリング/最近傍探索/ICP誤差関数
- オドメトリ推定
- 現代的なSLAMシステムの基本構成
- スキャン・マッチングによるオドメトリ推定/実装チュートリアル
- キーフレームベース・オドメトリ/実装チュートリアル
- 実装したオドメトリの課題
- Frame-to-Modelマッチング
- IMUフュージョン
- センサ・フュージョン方式
- 点群歪み補正
- 大域軌跡最適化とファクタ・グラフ
- 大域軌跡最適化
- ファクタ・グラフ最適化
- 相対姿勢制約を使ったポーズ・グラフ最適化
- ノイズ・モデルとロバスト・カーネル
- GTSAMを使った実装
- カスタム・ファクタ/実装チュートリアル
- GLIM:Versatile and Extensible Point Cloud-based SLAM Framework
- 点群レジストレーション・ファクタを多用した高精度・高信頼な状態推定
- スライディング・ウィンドウ最適化によるオドメトリ推定
- 大域マルチスキャン・レジストレーションによる大域最適化
- 汎用性・柔軟性を引き出すためのフレームワーク設計
- センサ・モデルに依存しない汎用点群処理
- 状態推定手法を切り替え可能なモジュラー設計
- ファクタ・グラフの柔軟性を引き出す拡張モジュール
- 点群レジストレーション・ファクタを多用した高精度・高信頼な状態推定
- 発展的トピック
- LiDAR SLAMの最新動向
- ファクタ・グラフの発展的解法
- 大域軌跡最適化
- 大域点群レジストレーションの最新動向
- 再探訪検知
- 特徴的マッチング
- 直接点群マッチング
- ノンパラメトリック状態の最新動向
- その他の研究動向
- LiDAR SLAMの最新動向
キーワード解説(著:ZEPエンジニアリング)
SLAM(Simultaneous Localization and Mapping)
自己位置と環境地図の同時推定と訳される.ロボットや自動運転車が周囲の環境を地図として認識しながら,自分の位置を特定する技術.カメラやLiDARなどのセンサを使い,周囲の特徴を捉えながら,自分がどこにいるのかを推定し,地図を同時に作成する.例えば,自動運転車は走行しながら道路や建物をマッピングし,自分の位置を正確に把握する.ロボット掃除機もSLAMを活用し,部屋の形状を認識しながら効率よく動く.拡張現実(AR)技術でも,空間を正しく把握するために使われている.
Jetson Orin Nano Super開発者キット
NVIDIAが提供する高性能なAIコンピュータ.コンパクトながら大幅な性能向上を実現している.従来のJetson Orin Nanoと比較して,AI性能が最大1.7倍向上し,67TOPSの推論性能を備える.メモリ帯域幅は102GB/s,CPUクロックは1.7GHz.ビジョン・トランスフォーマや大規模言語モデルなどの最新の生成AIをスムーズに実行可能.視覚処理やロボット工学,組み込みAIの開発に適しており,開発者や学生,メーカにとって優れた選択肢となる.価格は249ドル.既存のJetson Orin Nano開発者キットのユーザもソフトウェアのアップデートにより同様の性能向上を得ることができる.NVIDIAのJetPack SDKを活用すれば,CUDA,TensorRT,DeepStreamなどのAIツールを容易に利用でき,開発の効率を大幅に向上させることが可能.
参考ページ:NVIDIA Jetson Orin Nano Developer Kit Gets a “Super” Boost
点群レジストレーション
異なる視点やセンサで取得した複数の点群データを,同じ座標系に統一する技術.3DスキャンやLiDAR計測などで得られる位置や向きの異なる点群を重ね合わせることで,正確な3D形状を再構築できる.代表的な手法として,対応点を用いるICP(Iterative Closest Point)や,特徴点を活用するRANSACベースの手法がある.自動運転,ロボット・ナビゲーション,医療画像処理など幅広い分野で活用されており,正確な3Dモデル作成や位置推定の基盤となる重要な技術.
スキャン・マッチング
ロボットや自動運転車がLiDARやカメラなどのセンサーを用いて取得した環境データを比較し,自分の位置や移動量を推定する技術.取得したスキャンデータを既存の地図や直前のスキャンと照合し,最適な位置合わせを行うことで自己位置を推定する.主な手法には,点群の最適な一致を求めるICP(Iterative Closest Point)や,確率的手法を用いるNDT(Normal Distributions Transform)がある.
ファクタ・グラフ
確率分布を効率的に表現し,計算を簡略化するためのグラフ構造.変数ノードとファクタ・ノードの2種類のノードをもち,変数間の依存関係を明示的に示す.ファクタ・ノードは,複数の変数が満たすべき条件や関係を表し,ベイジアン・ネットワークやマルコフ確率場の計算を効率化する役割を果たす.主に機械学習やロボットの自己位置推定,SLAM,誤差補正などに用いられ,大規模な確率推論を実現するためのツール
GLIM(3D Range-Inertial Localization and Mapping with GPU-Accelerated Scan Matching Factors)
GLIMは,GPUを活用したスキャン・マッチングによる3次元点群・IMU SLAMのフレームワーク.従来のSLAMでは,自己位置推定のドリフト補正やセンサ・データの統合処理に課題があったが,GLIMは以下の点で改良が加えられている.
- 固定ラグスムージング(Fixed-lag Smoothing)を活用し,過去のセンサ状態を最適化しながらドリフトを補正
- キーフレームベースの点群マッチングにより,精度を向上させつつ計算コストを削減
- GPU並列処理を活用し,高速な計算を実現(従来のCPUベースの処理よりリアルタイム性が向上)
- IMUとの統合により,点群データのみでは困難な環境でも安定した自己位置推定が可能
GLIMは特に自動運転やロボットの高精度SLAMに適しており,少ない点群オーバーラップでも高精度なマッピングを実現できる.
大域姿勢推定
ロボットや自動運転車などが周囲の環境情報を基に,自身の位置と向きをグローバルな座標系で推定する技術.GPS,LiDAR,カメラ,IMU(慣性測定装置)などのセンサ情報を統合し,地図や既存のデータと照合することで,高精度な自己位置と姿勢を算出する.これにより,ナビゲーションや環境認識が可能になり,特に屋外の移動体において重要な役割を果たす.SLAMとの組み合わせや深層学習を活用することで,より高精度な推定が実現される
受講対象
- ロボットなどの環境を認識して自律で動くシステムに興味がある技術者・学生
- 点群を使った状態推定の理論を勉強し,実際に実装して動かしてみたい方
あると望ましい予備知識
- C++とPythonによる小規模なプログラミング経験
- ROS2のセットアップやノード起動などの基礎知識
講演の目標
- 点群SLAMの基礎から応用の理論と実装を習得する
実習に必要な周辺環境
-
[VOD/Full KIT/data]版/[VOD/Semi KIT/data]版場合
- 配布された実習キット(実習環境セットアップ済み)
- DisplayPort 接続対応のモニタ,DisplayPort ケーブル
※HDMI端子のみのモニタを使用する場合は,DisplayPort to HDMI変換アダプタなどをご用意ください. - キーボード,マウス(実習は Jetson 上で行います)
-
[VOD/data]版の場合
- Ubuntu 22.0または24.04インストール済みのPC
- CUDA 12.5以上(※NVIDIA GPU 環境のみ必要)
- 事前に提供されるスクリプトの設定およびサンプル・データ ※Jetson Orin Nanoや3D LiDARを準備可能な方は,[VOD/Full KIT/data]コースと同等の実習が可能です
講師紹介
略歴
豊橋技術科学大学で博士課程修了後,イタリア・パドヴァ大学での勤務を経て,現在は産業技術総合研究所で主任研究員を務める.
点群自己位置推定・環境地図生成を中心に,移動ロボットの環境認識・行動計画に関わる研究開発に従事する.
主な著書
- Koide et al., GLIM: 3D Range-Inertial Localization and Mapping with GPU-Accelerated Scan Matching Factors, Robotics and Autonomous Systems, Vol. 179, pp. 104750, 2024
- Koide et al., Globally Consistent 3D LiDAR Mapping with GPU-accelerated GICP Matching Cost Factors, IEEE Robotics and Automation Letters, Vol. 6, Issue. 4, pp. 8591-8598, Oct., 2021
- Koide., small_gicp: Efficient and parallel algorithms for point cloud registration, The Journal of Open Source Software, Vol. 9, pp. 6948, 2024
受賞歴
- 第30回 ロボティクスシンポジア 最優秀賞, Mar., 2025
- 第27回 ロボティクスシンポジア最優秀賞, Mar., 2022
- 計測自動制御学会SI部門 若手奨励賞, Dec., 2024
- IEEE Robotics and Automation Letters Outstanding Reviewer, May, 2023
- SICE International Young Authors Award for IROS2022, Oct., 2022
参考URL
- 教材コード:"gtsam_points : A collection of GTSAM factors and optimizers for point cloud SLAM", https://github.com/koide3/gtsam_points
- 教材コード:"GLIM : Versatile and Extensible Range-based 3D Localization and Mapping Framework", https://github.com/koide3/glim