受講無料!5月7日限定再配信
[Webinar]LiDAR×RTK×IMUフュージョン!
自動運転&SLAMロボット開発 要点100
ドローン&自律移動システムのための高精度測位・制御技術
- 受講料:無料(全4セッション)
- 開催日:5月7日(水)10:00~16:00
- 申込締切:5月7日(水) 10:00
- 受講方法:Zoom・Vimeoでオンライン視聴
※本ウェビナは,2024年11月15日に実施したウェビナの再配信版です.一部セッションを除き,当時の内容をそのままご覧いただけます. - 注意事項:
- 接続先は,お申し込み後に自動配信されるメールに記載されています.
- 録画配信のため質疑はできません.
- お問い合わせ:info@zep.co.jp (03)6825-5851
企画主旨
自動運転技術,ドローン,ロボティクス,インフラ管理など,現代の高度な移動システムやサービスには,高精度な測位や制御技術が不可欠です.特に,GPSやGNSS技術の進展に伴い,都市部や森林などGPS信号が不安定な環境では,センサ・フュージョン技術が重要です.
ドローンの姿勢制御やセンサ・フュージョン技術の活用方法に加え,精度向上のための手法や実践的な技術を解説します.具体的な応用事例を通じて,これらの技術が現場でどのように活用されているのかを紹介します.
【セッション1】
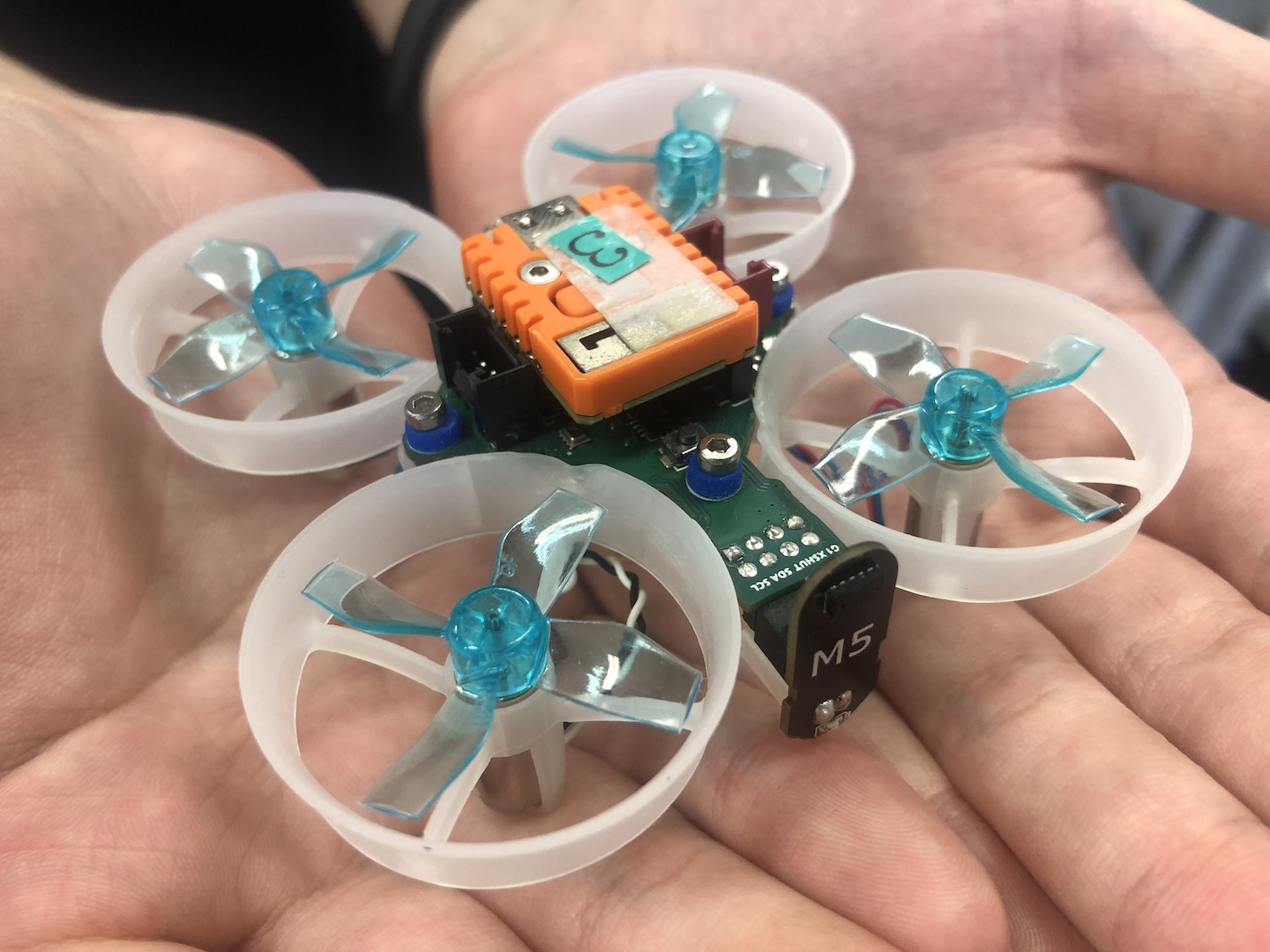
$50キット“M5Stamp Fly”に0から実装!ドローンの姿勢制御プログラミング
推力測定からモデリングまで!高安定飛行に成功するための要点
- 日時:5月7日(金) 10:00~10:55
- 講師: 伊藤 恒平(金沢工業大学)
講演内容昨今,ドローンは日常的に耳にする存在となり,海外では宅配用ドローンがすでに生活の一部を担っています.しかし,日本でドローンを購入しようとすると,その多くが海外製であり,部品も国産品はほとんど見当たりません.さらに,ドローンの内部構造や制御技術がブラックボックス化されており,自由な発想での開発が困難です.このような状況で,単に購入して使い方を学ぶだけでは,次第にドローンを飛行させる技術が失われる可能性があります. 実際のところ,ドローンの飛行制御はそれほど難しいものではありません.適切な知識があれば,誰でも自分で飛行制御プログラムを構築できます. 本セッションでは,2024年8月に発売されたプログラム可能な小型ドローン「M5StampFly」を題材に,購入からわずか4日間で飛行制御プログラムを作成するための要点を解説します.使用する言語はCおよびC++で,センサのデータ取得やモータ制御を行うための基本的なAPIをオープンソースとして提供します. 本セッションを通じて,モータやセンサの扱い方に加え,ドローンを自由に飛行させるための基礎知識を習得できることが期待されます. 受講対象
講師紹介略歴
参考資料 |
【セッション2】
カルマン・フィルタによるGPS測位精度向上 要点10
GPS/IMUを中心としたセンサ複合と成功・失敗事例

- 日時:5月7日(金) 11:10~12:10
- 講師:目黒 淳一(名城大学)
講演内容近年,GPS/GNSS技術の進展により,一般的な製品でも高精度な位置情報が利用可能となっています.これにより,測量だけでなく,さまざまな移動システムの運行管理や,自動車やロボットの自動運転にもGPS/GNSSが活用されてます.しかし,GPS/GNSSには,位置推定のために衛星からの信号が必須という制約があります.このため,GPS/GNSS単独では常に位置を推定できない場合があり,他のセンサやシステムと併用することが一般的になっています. 本セッションでは,まずGPS/GNSSの最新技術動向と基本的な測位原理について解説します.次に,GPS/GNSSが利用できない環境に対応するために開発・活用されている技術について説明します.特に慣性センサ(ジャイロ,加速度計)に焦点を当て,これらが組み込まれたIMU(Inertial Measurement Unit)の最新動向と利用上の注意点,さらにGPS/GNSSと組み合わせて使用される際のカルマン・フィルタやパーティクル・フィルタの構成と,その利用における留意点について解説します. 受講対象
講師紹介略歴
主な著書
|
【セッション3】
基準局レス!センチ・メートルCLAS測位入門
通信インフラに依存しない安定した測位環境の実力を探る

- 日時:5月7日(金) 14:00~14:55
- 講師: 岡本 修(茨城工業高等専門学校)
講演内容低価格なマルチバンドRTK受信機の台頭や,ソフトバンクなどが提供するRTK基準局情報配信サービスにより,RTK測位の利用環境の整備が急速に進みました.基準局からの距離が10km超となる長基線長でも非公式ながらFixする受信機も多く使われており,日本全土でどこでもRTK測位が利用できる環境が整いつつあります.社会インフラの維持管理にRTK測位を応用しようとする取り組みも始まっていますが,課題として,これらサービスがモバイル・データ通信の上に成り立っていることです. 近年頻発する豪雨や地震などの大規模災害では,堅固と思われていた通信インフラがダメージを受け,その利用に支障を生じました。このような問題を解決するのが,日本が独自に打ち上げて運用管理する衛星測位システム「みちびき」です.現在,運用中の4機の衛星からは,独自の補強信号サービスが提供されています. この補強信号に対応する受信機1台だけで,次世代の高精度衛星測位として期待されるCLASとMADOCA-PPPというセンチメートル・レベルの高精度測位ができます.契約不要の無料放送で,基準局データは不要なのでRTK測位のように他の通信に頼る必要はありません.このように世界に誇る先進的なサービスですが,その実力はまだ多くの人には知られていません.本セッションでは,その測位性能について皆さんと共有いたします. 受講対象
講師紹介略歴
1993年西松建設(株)技術研究所研究員,2000年茨城工業高等専門学校助手,2002年博士(工学)「リアルタイム・キネマティックGPS測位の建設工事における応用に関する研究」,主に建設業における高精度衛星測位の応用において,1周波RTK測位の普及等のローコスト化,遮蔽やマルチパスの多い環境におけるセンチメータ級測位の応用,誤差補正法に取り組む.RTK-GPSの誤差補正法等で2001年日本測量協会測量技術奨励賞,地下埋設物可視化システムの開発で2019年土木学会技術開発賞を受賞.2020年より静岡大学土木情報学研究所客員教授. 主な著書
|
【セッション4】
u-blox F9P×2個を使った高精度キネマティック測位&GNSSコンパス
リアルタイムでセンチメートル測位&方向精度0.4°で姿勢測定

- 日時:5月7日(金) 15:00~16:00
- 講師:樋田 啓
講演内容RTK(RealTime Kinematic)に代表されるキネマティックGNSS(Global Navigation Satellite System)測位は,数センチメートルの精度で位置情報を取得できるため,測量分野をはじめ,農業機械やドローンの自動制御など,幅広い応用がなされています.また,2台以上のGNSSアンテナを数メートル離して測定対象物に取り付けることで姿勢角を測定する「GNSSコンパス」は,キネマティックGNSS測位の重要な応用技術です. 本セッションでは,まずGNSSを用いた単独測位の基礎を解説した後,キネマティック測位において誤差要因をどのように除去し,高精度な測位が実現できるかについて詳しく説明します.また,2万円程度と比較的安価に入手できるGNSSモジュール(u-blox ZED-F9P)を人力飛行機に搭載し行ったキネマティック測位やGNSSコンパスによる姿勢測定データの実例を紹介します.さらに,INS(慣性航法装置)とGNSSを組み合わせた複合航法装置を用いた姿勢測定との比較を行い,両者が0.4度程度の範囲で一致することがわかりました. 受講対象
講師紹介略歴
主な著書
|
お問い合わせ
ZEPエンジニアリング株式会社
177-0041 東京都練馬区石神井町1-23-10 2F(映像編集室)
info@zep.co.jp (03)6803-2591