























































LiDAR×ROSで作る地図作成ロボット
第1回 SLAMロボット“ROS次郎”の製作
地図を作って自律移動するSLAMロボットの作り方を解説
 |
|---|
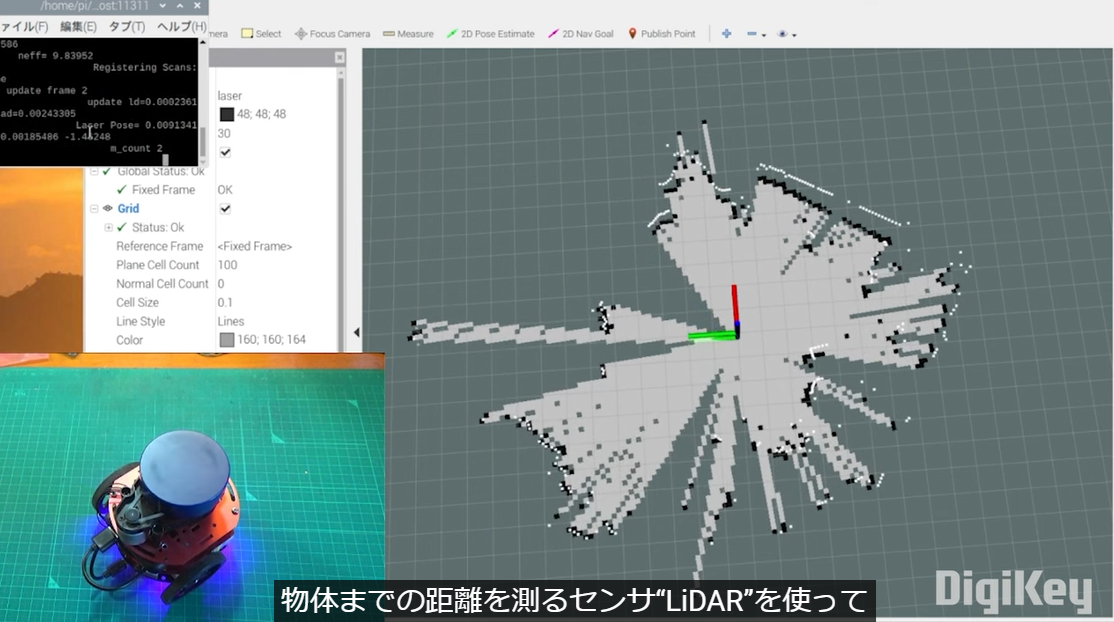
| 図1 LiDAR×ROSで作る地図作成ロボット[第1回]SLAMロボット“ROS次郎”の製作 DigiKeyチャンネルにて視聴可能 |
掃除したり配膳したり警備したり…人に代わって働く自律ロボットをよく目にするようになりました.
これらの最新ロボットには,“SLAM”(Simultaneous Localization and Mapping)と呼ぶ「自己位置推定」と「地図作成」のテクノロジが利用されています.
第1回は,私が自作したSLAMロボット「ROS次郎」を題材に,そのしくみや開発のあらましを解説します.
ROS次郎のプログラミングには,今や自律ロボットやAIロボット開発に欠かせないオープンソース・ライブラリ“ROS”を利用しました.
また“ROSSerial”というROSライブラリを使って,小型化と長時間動作も実現しました.
本動画シリーズでは,空港やレストラン,家庭で活躍中のロボットのテクノロジを全4回で解説します.
今どきのロボットは,レーザ光を利用して障害物までの距離を測る“LiDAR”(Light Detection And Ranging)や姿勢を計測する“IMU”(Inertial Measurement Unit)などの高度なセンサを搭載して,部屋や障害物の位置を捉えて地図データを作成します.
この技術を“SLAM”(Simultaneous Localization and Mapping)と呼びます.
実際の開発には,地図作成や自律移動,通信,AIなど,高度なプログラムを実装する必要がありますが,オープンソースのプログラム・ライブラリ“ROS”(Robot OS)が誕生して,大きな注目を集めています.
動画では,自称「仕事も趣味もロボット製作」の講師が,自作したローバを例に,SLAM技術のあらましやROSの使い方,ハードウェアの作り方を実験をしながら具体的に解説します.
ラズベリー・パイ4上で,LiDARやIMUの測定値から地図データが作成されるようすは一見の価値があります.
チャプタ・リスト
- 0:45 自己紹介と製作テーマ
- 2:22 位置推定&地図生成技術“SLAM”
- 4:27 SLAMロボット開発の鍵“ROS”
- 6:40 製作するSLAMロボットのハードウェア
- 8:22 ROSSerialのしくみ
- 8:59 ROS次郎のハードウェア
- 11:12 まとめ
- 11:37 次回予告
著者紹介
- 1994年 事務機器メーカ入社.エレクトロニクス関連の開発と設計.2016年 CQ出版社 トランジスタ技術にマイコンやロボット関連の技術解説記事を寄稿.Maker Fair Tokyoに出展.マイコン4足歩行ロボット製作キット「クワッドクローラ」を開発.ESP32を使用した小型のSLAMロボットを開発2022年 ZEPエンジニアリング社にて,キット付きウェブセミナ [VOD/Pi4 KIT] SLAMロボット&ラズパイ付き!ROSプログラミング超入門」の講師を行う
著書
- 砂川 寛行;[VOD/Pi4 KIT] SLAMロボット&ラズパイ付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- 砂川 寛行;5ドルI/Oコンピュータ「ラズパイZero」の研究,トランジスタ技術2016年3月号,CQ出版社.
- 砂川 寛行;付録Xホビー・スパコンで科学の実験,プロローグ~第3章,トランジスタ技術2016年8月号,CQ出版社.
- 砂川 寛行;全実験室に!高IQアルデュイーノ基板,トランジスタ技術2017年2月号,CQ出版社.
- 砂川 寛行;トラ技ポケコン「I/OSOLDIER」の製作,トランジスタ技術2018年2月号,CQ出版社.
- 砂川 寛行;LiDARで自己位置推定!1万円自立移動ロボット「PiBoT」,トランジスタ技術2019年10月号から隔月連載,CQ出版社.
- 砂川 寛行;スピード製作!初歩の遠隔制御ロボット,トランジスタ技術2020年12月号,CQ出版社.
- 砂川 寛行;ラズパイ5でサクッと始める私流のAI電子工作,インターフェース 2024年5月号,CQ出版社.
参考文献
- [VOD/Book]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】,ZEPエンジニアリング株式会社.
- [VOD/Book]Pythonで一緒に!ロボット制御のモデルベース設計【状態フィードバック制御編】,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT] MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.