
|
|---|
上下/ロール/ピッチ/ヨー機体の運動を自在制御
4つのプロペラの回転と運動の関係を整理
クアッド・コプタの基本運動と座標系
|
|---|
|
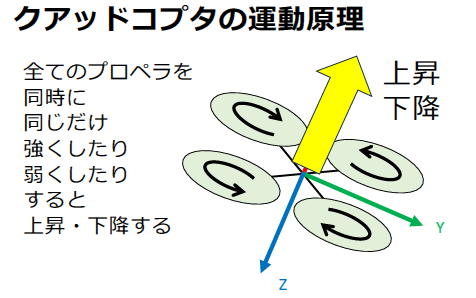
図1 4枚のプロペラをもつクアッド・コプタは,推力の合成とトルクの制御によって機体の姿勢と位置を制御する.画像クリックで動画を見る.または記事を読む.[提供・著]伊藤恒平 詳細:[VOD/KIT/data]ドローン・キット``drone Fly''で学ぶマルチコプタ制御入門 |
4枚のプロペラをもつクアッド・コプタは,推力の合成とトルクの制御によって機体の姿勢と位置を制御します.機体の運動は大きく「上下」「ロール」「ピッチ」「ヨー」の4つに分類されます.これらはそれぞれ独立した運動成分であり,組み合わせることで自由な飛行姿勢を実現できます.
座標系は航空分野で一般的に使用される右手座標系です.前方をX軸,右方向をY軸,下方向をZ軸とし,各軸まわりの回転運動が姿勢制御の基本要素です.これらの関係を正しく理解することが制御アルゴリズム設計の前提になります.
各軸まわりの回転運動
クアッド・コプタは4つのプロペラの回転数を変化させることで,3軸方向の姿勢を制御します.
- ロール回転(X軸まわりの回転):機体を左右に傾ける運動です.後方から見て時計回りが正方向です
- ピッチ回転(Y軸まわりの回転):機体の前後を上下させる運動です.前方が上がる方向が正の回転です
- ヨー回転(Z軸まわりの回転):機体の向きを左右に変える回転運動です.上から見て時計回りが正方向です
この3つの回転は独立しており,それぞれの軸のトルクバランスを制御することで姿勢が決まります.また,4枚のプロペラの回転方向は対角線で互いに逆に設定され,トルクを相殺する構造です.
上昇・下降運動と推力の合成
上下方向の運動は,4つのプロペラが発生する推力の総和によって制御されます.
- 全プロペラの回転数を増加させると推力が重力を上回り,上昇します
- 全プロペラの回転数を減少させると推力が減り,下降します
このように,上下運動は各プロペラの回転を均一に変化させることで実現されます.一方で,ロール・ピッチ・ヨーは対角線や左右のプロペラ間で回転数を差動制御することで実現します.
運動制御における軸間の関係
ドローンの制御では,X軸(ロール),Y軸(ピッチ),Z軸(ヨー)の順に姿勢制御ループを構成します.これらの制御信号はPID制御や状態フィードバックなどで生成され,各モータ出力に変換されます.
また,前後や左右への平行移動は,ピッチやロールの角度を少し傾けることで得られる加速度成分によって生じる副次的な運動です.機体の姿勢制御を安定させることが位置制御の精度向上にもつながります.
4つの運動を制御する意義
クアッド・コプタの飛行制御は,以下の4つの基本運動を安定的に制御することに集約されます.
- 上昇/下降運動:推力の合成制御
- ロール回転:左右バランスの制御
- ピッチ回転:前後バランスの制御
- ヨー回転:機体方向の制御
これらを理解することで,センサ・データや制御信号をどのように組み合わせるかの基礎が明確になります.飛行プログラムでは,この4軸制御がリアルタイムで連動して動作しています.
〈著:ZEPマガジン〉