
|
|---|
ねらった姿勢にピタリ!フィードバック制御の導入
M5 StampFlyで実習マルチコプタ制御プログラミング
フィードバックの基本原理
|
|---|
|
図1 フィードバック制御を導入することで,ドローンの操縦者が行う操作量は少なくても安定した姿勢を維持できるようになる.画像クリックで動画を見る.または記事を読む.[提供・著]伊藤恒平 詳細:[VOD/KIT/data]ドローン・キット``drone Fly''で学ぶマルチコプタ制御入門 |
クアッド・コプタのような飛行体を安定して制御するためには,センサで得られる角速度や加速度などの情報をもとに,モータ出力を適切に調整する必要があります.このとき中心的な役割を果たすのが「フィードバック制御」です.
フィードバックの基本原理
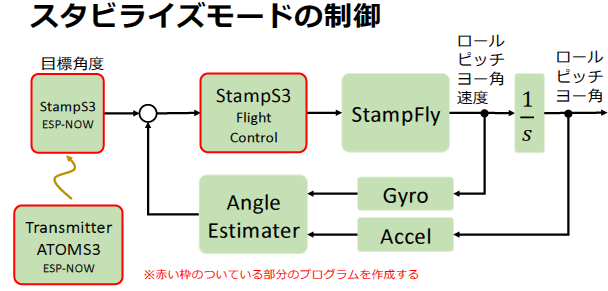
フィードバックとは,機体の実際の動きをセンサで検出し,その情報をもとに制御信号を補正するしくみです.たとえば,ジャイロ・センサが角速度を計測し,その値を制御系に戻して比較します.目標とする角速度を$0$とすれば,機体が回転しようとするとその差が検出され,出力を逆方向に補正して姿勢を保つことができます.
このように,実測値と目標値を比較して差(誤差)を求め,その誤差に応じて制御信号を変化させるのがフィードバック制御の基本です.誤差が正のときは逆方向に,負のときは順方向に補正を行い,全体を安定に導きます.このような制御方式をネガティブ・フィードバックと呼びます.
フィードバック制御ループの構成
制御ループは以下のような流れで構成されます.
- 目標値を設定する(たとえば角速度$0$や希望のピッチ角など)
- ジャイロ・センサなどから実際の角速度や姿勢角を取得する
- 目標値と実測値の差(誤差)を求める
- 誤差に基づき,モータ出力や制御信号を補正する
- 補正後の状態を再びセンサで検出し,ループを継続する
このループを高い周期で繰り返すことで,外乱や操作による姿勢変化を瞬時に補正し,安定した飛行を実現します.
スタビリティ・オーギュメンテーション・システム(SAS)
航空機やドローンでは,このような安定化のためのフィードバック制御を「スタビリティ・オーギュメンテーション・システム(Stability Augmentation System:SAS)」と呼びます.SASは,人間の操縦入力では補正が追いつかない高速な姿勢変化を自動的に制御する補助系です.
機体の動きをリアルタイムに補正し,外乱に対しても姿勢を維持するよう動作します.たとえば突風や急な操作によって姿勢が崩れそうになった場合でも,SASが働くことで機体は安定を保ちます.
制御系設計の意義
フィードバック制御を導入することで,操縦者が行う操作量は少なくても安定した姿勢を維持できるようになります.これは単に便利というだけでなく,システム全体の安全性を大きく高める要素です.また,この制御手法は航空分野だけでなく,ロボット・アームや車両の姿勢制御など幅広い応用があります.
安定した飛行を実現するためには,センサの精度,制御周期,ゲイン設定など多くの要素を総合的に設計する必要があります.その第1歩が,フィードバック制御のしくみを正しく理解し,機体の目標姿勢と実際の応答を一致させる考え方を身につけることです.
〈著:ZEPマガジン〉