
|
|---|
制御プログラムの良否判定時間応答と周波数応答
M5 StampFlyで実習マルチコプタ制御プログラミング
制御パラメータの影響
|
|---|
|
図1 P制御やPID制御を用いることで,立ち上がり特性やオーバーシュートを調整できる.パラメータ調整により,時間応答の速度と安定性をバランスさせることが可能.画像クリックで動画を見る.または記事を読む.[提供・著]伊藤恒平 詳細:[VOD/KIT/data]ドローン・キット``drone Fly''で学ぶマルチコプタ制御入門 |
制御対象に一定の目標値を入力すると,物体は0の状態から立ち上がり,目標値に到達します.その際,目標値を超えて振動することがありますが,最終的に一定値に落ち着く状態を定常状態と言います.この挙動は制御プログラムの安定性を判断する重要な指標です.
立ち上がり時間やオーバーシュート,定常偏差などを評価することで,制御プログラムの良否を判定できます.定常偏差は目標値に対する最終的な誤差であり,可能な限り小さくすることが制御の目的です.
制御パラメータの影響
P制御やPID制御を用いることで,立ち上がり特性やオーバーシュートを調整できます.パラメータ調整により,時間応答の速度と安定性をバランスさせることが可能です.
- 立ち上がり時間:目標値に達するまでの時間を短くする
- オーバーシュート:目標値を超える振幅を小さくする
- 定常偏差:最終的な目標値との差を最小化する
周波数応答と位相遅れ
制御対象に正弦波状の入力信号を与えると,出力は入力に応じて変化します.入力周波数を上げると,出力の振幅は徐々に小さくなり,ピークの位置もずれることがあります.このずれは位相遅れと呼ばれ,周波数応答の解析で重要な指標です.
周波数応答では入力周波数に対する出力の振幅比と位相を測定します.振幅比はゲイン,位相遅れは制御対象の応答時間を示し,制御性能の判断材料になります.
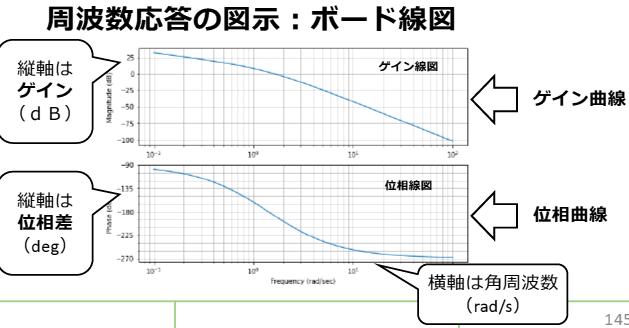
ボード線図の活用
ボード線図では横軸を周波数,縦軸をゲインや位相として表現します. これにより,幅広い周波数範囲での制御対象の応答特性を可視化できます.
- ゲインセン図:入力信号に対する出力の振幅比をデシベル単位で表示
- 位相図:入力信号に対する出力の位相遅れを表示
自然界の制御対象では,周波数が高くなるほどゲインは減少し,位相は右肩下がりに遅れます. これらの特性を理解することで,制御プログラムがどの周波数範囲で安定に動作するかを評価できます.
M5 StampFlyでの実習
実習では,M5 StampFlyを用いてマルチコプタ制御を体験します.時間応答と周波数応答の観察を通じて,制御パラメータが実際の挙動にどのように影響するかを学習できます.
入力信号や出力応答を確認しながら,P制御やPID制御のパラメータ調整を実施します.立ち上がり時間,オーバーシュート,定常偏差,ゲイン,位相遅れなどの指標を用いて制御の良否を判定します.
〈著:ZEPマガジン〉