










[VOD]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】
PID制御則の基本から動的システムの表現/特性,ゲイン調整法,2自由度化まで
2023年7月12日

|
|---|
- 型名:z-modelpid-on2
- 仕様:開発・実習用ソース,講義341分,解説159頁
- 定価:11,000円(税込)
- 著者・講師: 南 裕樹/Yuki Minami
- 企画制作・主催: ZEPエンジニアリング株式会社
- 1人当たり1ライセンスです
- 関連製品:[VOD/Book]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】
- 関連製品:[VOD/Book]Pythonで一緒に!ロボット制御のモデルベース設計【状態フィードバック制御編】
- 関連製品:[VOD]Pythonで一緒に!ロボット制御のモデルベース設計【状態フィードバック制御編】
- 関連製品:[VOD/Pi2W KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門
- 関連製品:[VOD/KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門
- 関連製品:[VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門
- 関連製品:[VOD/KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門
- 関連製品:[VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門
- 関連製品:[VOD/KIT]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門
 |
 |
|---|
学ぶこと
制御工学は,モノの動きをデザインする科学です.
制御工学では,まず,モノ(システム)の動特性を調べます.そして,その特性を理解した上で,望ましい動きになるような制御器を設計します.「Pythonで一緒に!ロボット制御のモデルべース設計」シリーズでは,さまざまな設計手法の考え方と計算テクニックをPythonプログラミングを活用しながら解説します.
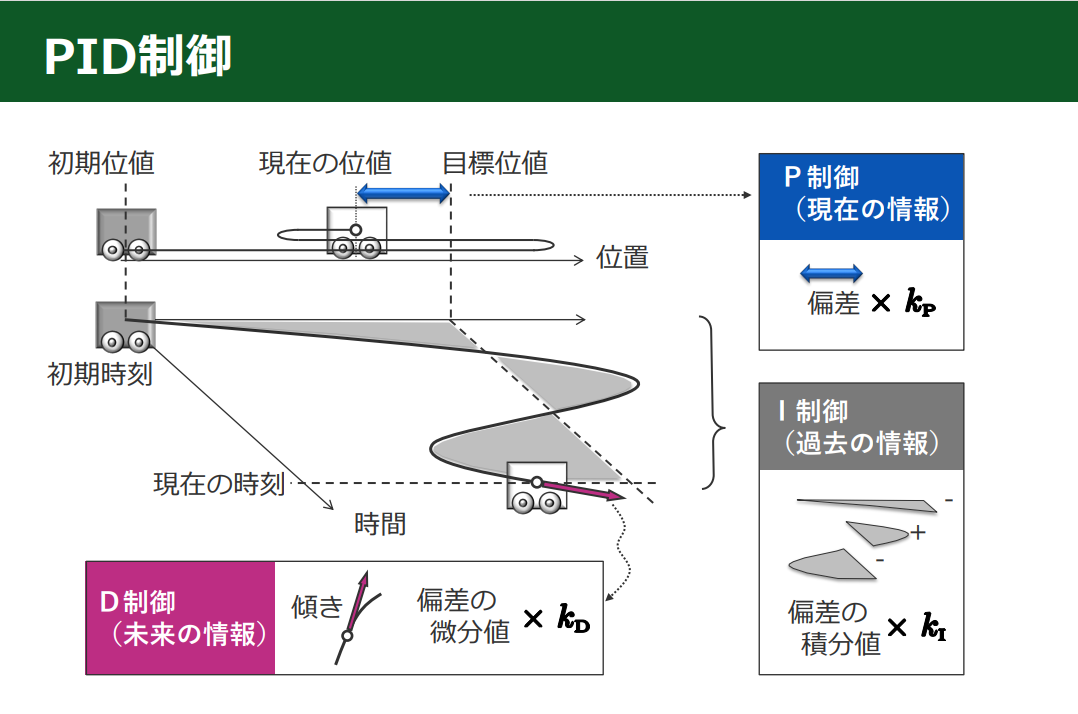
本VODでは,「PID制御」を学びます.PID制御は,比例・積分・微分の3つの演算を組み合わせた制御則です.直感的でわかりやすく,広く用いられている制御則のひとつです.まず,システムの伝達関数表現,時間応答や周波数応答を復習します.そして,PID制御の概要を説明した後,PIDゲインのチューニング方法を解説します.さらに,さまざまなPID制御を紹介します.
本VODでは,講義テキストとして「制御系設計論(コロナ社)」も使用します.本書籍が必要な場合は,次の製品をご検討ください.
[VOD/Book]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】
 |
|---|
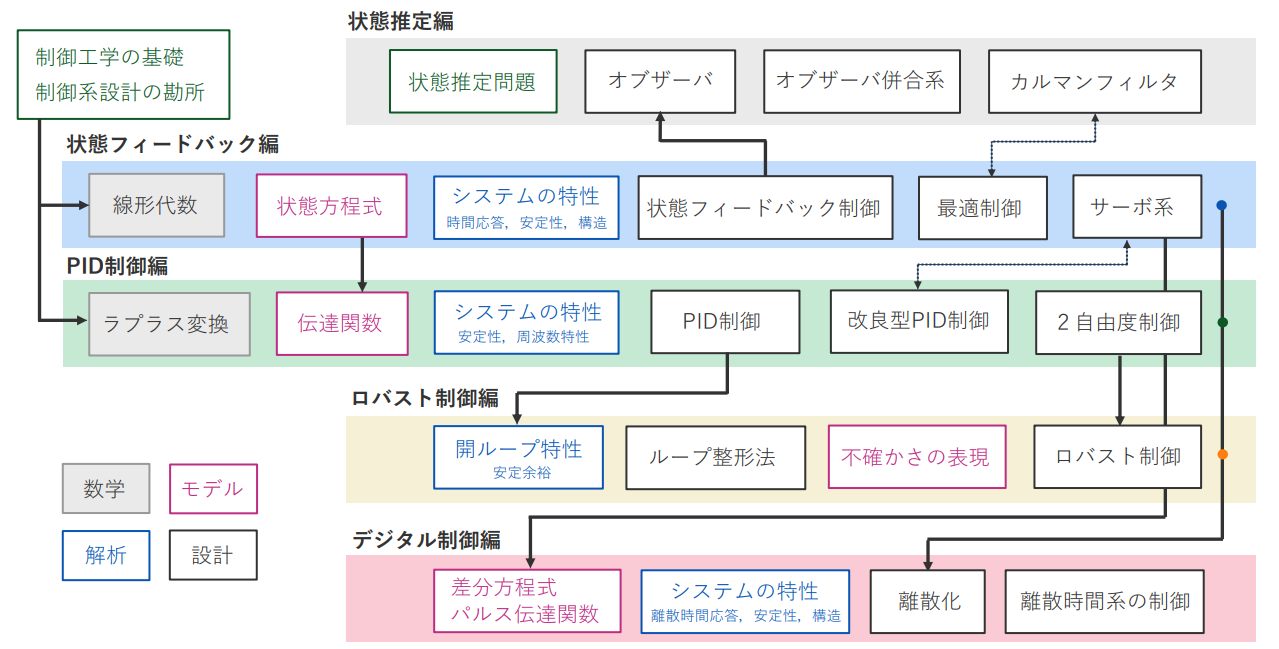
| 図1「Pythonで一緒に!ロボット制御のモデルべース設計」シリーズの学習内容 |
 |
|---|
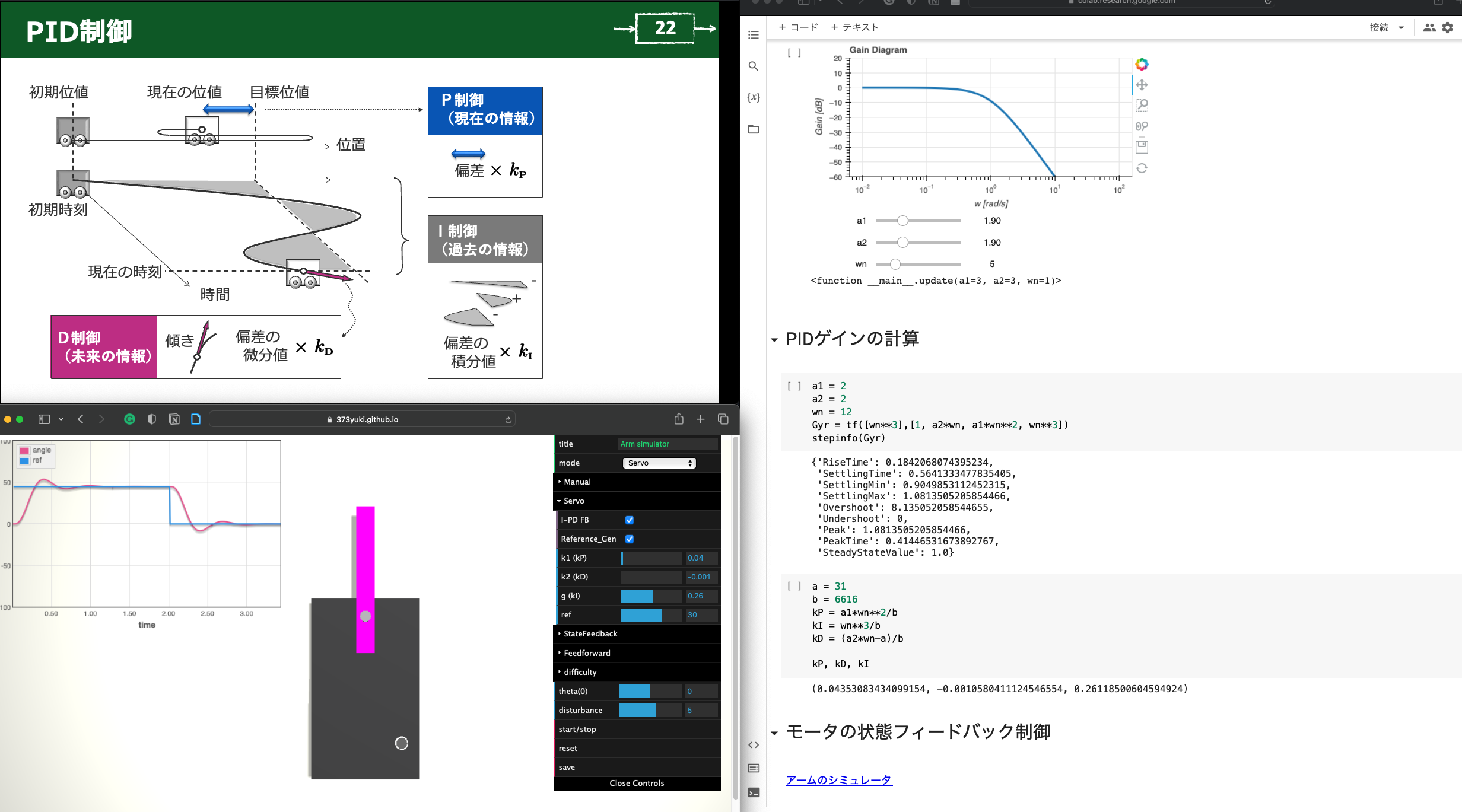
| 図2 本セミナでは,WEBブラウザ上でPythonを実行できるGoogle Colaboratoryや,アーム/倒立振子のシミュレータも動かしながらPID制御を学ぶ |
アジェンダ
(1)制御系設計の流れと勘所
(2)動的システムの表現
- 常微分方程式によるモデリング
- 伝達関数
- ラプラス変換
(3)動的システムの特性
- 時間応答
- 安定性
- 周波数応答
- Pythonで時間応答・周波数応答の可視化
(4)PID制御
- PID制御則
- PID制御系の特性
- PythonでPID制御系の特性を可視化
(5)PIDゲインの調整方法
- Ziegler-Nicholsの調整法
- モデルマッチング法
- Pythonでゲイン・チューニング
(6)改良型PID制御
- PI-D制御とI-PD制御
- 不完全微分
- アンチワインドアップ
- 2自由度制御
ショートセミナ
PID制御編の概要
ドローンの高度制御…P制御の限界
限界感度法によるゲイン・チューニング
受講対象
- 制御工学の基礎を学びたい方
- 制御系設計の方法を知りたい方
- Pythonで制御工学を体験したい方
あると望ましい予備知識
- 力学や電気回路の基礎(オームの法則を知っている)
- 複素関数の基礎(複素数の演算ができる)
- プログラミングの基礎(数行のコードを書いて実行したことがある)
講演の目標
- 制御工学の基礎をざっくりと理解する
- 制御系設計(動きのデザイン)の基本的な方法を説明できる
- 簡単なPytonプログラムを作成できる
受講者が事前に準備するもの
- 筆記用具と計算用紙(ノート)
- Pythonプログラム実行環境(Google Colabratoryなど)
※後述のモデルベース設計2.pdfの3ページ目を参照してPython環境の準備をお願いします.
Google Colaboratoryの利用を推奨します.
本オンデマンド製品を購入された方へ ~視聴リンクとパスワード~
下記リンク先(青字)をクリックして,本製品購入後にメールにてお知らせしたパスワードを入力してください.
341分講義ビデオ(著作権保護のためパスワードがかけられています)
『Pythonで一緒に!ロボット制御のモデルベース設計 【PID制御編】』講義ビデオ.mp4
- 0:00:10 イントロダクション
- 0:11:38 はじめに,制御工学の基礎 ~制御とは,フィードバック制御,ブロック線図,制御系設計の流れと勘所~
- 0:56:13 制御系CADの紹介,数学の基本事項 ~Python-ControlライブラリとPythonの作法,複素数とラプラス変換~
- 1:57:57 制御のためのモデル ~動的システム,伝達関数モデル,状態空間モデルとの関係~~
- 2:37:02 制御系の解析 ~時間応答,極とふるまいの関係(安定性),周波数応答,設計仕様~
- 4:02:29 PID制御① ~PID制御の概要,改良型PID制御,2自由度制御~
- 4:58:22 PID制御② ~ゲイン・チューニング,PID制御の発展~
- 5:36:20 QA
159頁 講義テキスト(著作権保護のためパスワードがかけられています)
ソースコードとシミュレータ(著作権保護のためパスワードがかけられています)
講師紹介
略歴
2009年3月京都大学大学院情報学研究科博士後期課程修了.
日本学術振興会特別研究員(DC2),舞鶴工業高等専門学校助教,京都大学特定助教,
奈良先端科学技術大学院大学助教,大阪大学講師などを経て,
2019年3月より大阪大学大学院工学研究科機械工学専攻准教授.
博士(情報学).一般社団法人みんなの制御塾代表理事.
主な著書
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】,ZEPエンジニアリング.
- [VOD/Book]Pythonで一緒に!ロボット制御のモデルベース設計【状態フィードバック制御編】,ZEPエンジニアリング.
- [VOD/Pi2W KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング.
- 制御系設計論,コロナ社 (2021).
- やさしくわかるシーケンス制御,オーム社.(2020).
- Pythonによる制御工学入門,オーム社 (2019).
- 倒立振子で学ぶ 制御工学,森北出版 (2017).
- Arduino×Pythonで動かしながら学ぶモータ制御入門,トランジスタ技術2020年9月号.
関連製品
- [VOD/Book]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】
- [VOD/Book]Pythonで一緒に!ロボット制御のモデルベース設計【状態フィードバック制御編】
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【状態フィードバック制御編】
- [VOD/Pi2W KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門【z-motor-on1】
- [VOD/KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門【mz-motor-on2】
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門【mz-rosrobo-on3】
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門【mz-matrobo-on1】
- [VOD/KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門【mz-matrobo-on2】
- [VOD/KIT]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門【z-kalman-mv2】
パーツキットと講義動画でプロの技術を1日習得
スピードマスタ・シリーズ
電子回路・基板設計からプログラミングまで,エンジニアがマスタすべき技術は多岐にわたり,開発期間も短くなっています.多くの書物を読み漁ったり,玉石混交のネット情報に振り回されたりしている暇はありません.
本シリーズには,各分野の一線で活躍する技術者が厳選したパーツセット,設計の要点を効率よく解説するセミナ動画,講義テキスト,お手本ソースコードなどが同梱されています.百戦錬磨の技を一見することで,未経験の技術が驚くほど短時間で身につくだけでなく,信頼性の高いシステム開発に必要なプロの眼が養われます.