










[Webinar]ラズパイとPythonで一緒に!カルマン・フィルタ&センサ・フュージョン入門
位置/故障/姿勢まで,センサで測れない物理量も正しく推定&制御(講義350分/解説176頁)
2025年8月15日
- 著者・講師: 南 裕樹
- 企画編集・主催: ZEPエンジニアリング株式会社
- 1人当たり1ライセンスです
お申込み
下記スケジュール表のボタンを押すと,セミナの購入ページに移動しますので,支払い手続きを行ってください.
ご購入前にご理解いただきたいこと
- 本製品は,2025年10月10日に開催したウェビナを録画して編集した動画です.繰り返し再生,一時停止,巻き戻しが可能です.
- すべての映像,画像,文書テキスト,ソースコードは,著作権法によって厳格に守られています.無許可の転載,複製,転用は法律により罰せられます.
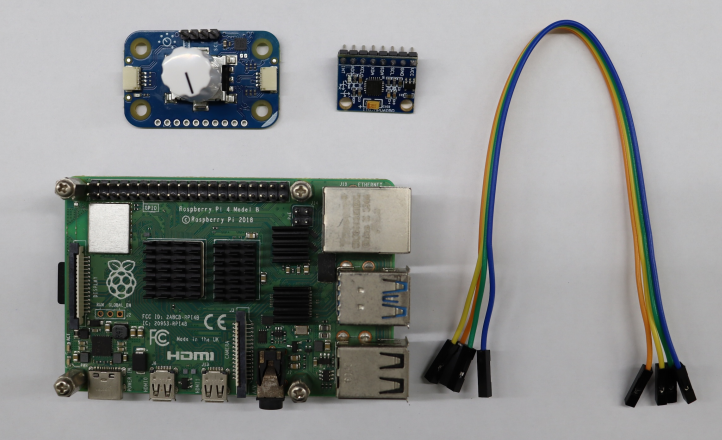
本セミナで配布する実習キット
- Raspberry Pi 4 Model B 2GB
- USBケーブル&ヒートシンク
- 実習環境書き込み済みマイクロSDカード
- MPU-6050搭載 6軸IMUモジュール(ジャイロ+加速度センサ)
- ロータリ・エンコーダ・モジュール(Modulino Knob)
- メス-メス・ジャンパ
 |
|---|
| 写真1 理論だけでなく,Pythonと実習キットを動かしながら制御系の状態推定やカルマン・フィルタを実体験できる |
学ぶこと
あらまし
制御工学は,モノの動きをデザインする科学です.対象となるシステムの動特性を把握し,それに基づいて制御器を設計することで,望ましい動作を実現します.なかでも,制御システムの設計や運用においては,システム内部の状態を的確に把握することが極めて重要です.
しかし実際には,すべての状態量をセンサで直接観測することは難しく,多くの場面で,限られた入出力データから内部状態を推定する技術が必要とされます.本セミナでは,こうした状態推定問題とその解法のひとつであるカルマン・フィルタの基礎を,Raspberry Piとセンサを用いた実習キットを併用しながら学びます.
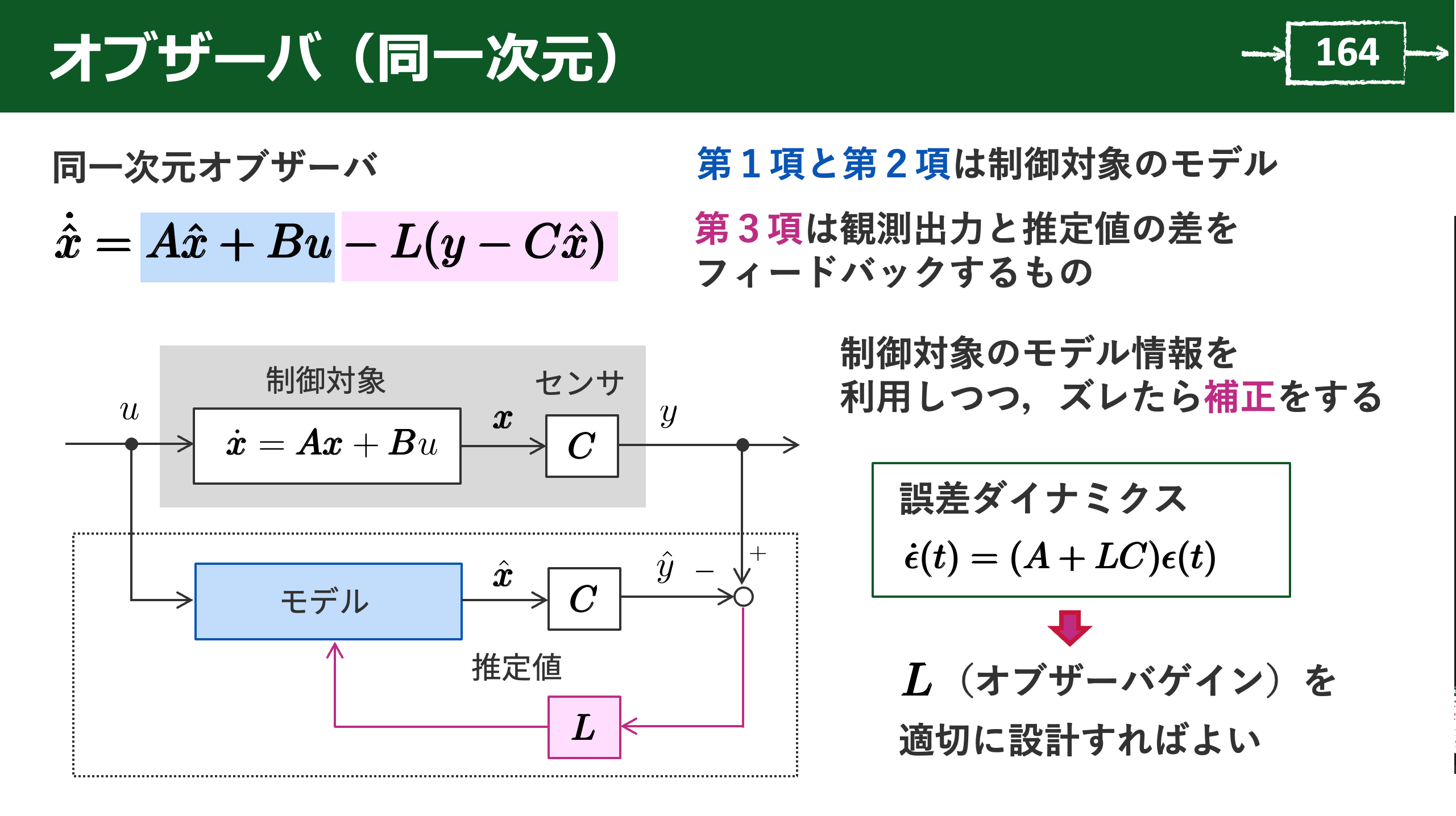
まず,状態推定問題の基本的な考え方と,差分近似を用いた簡易的な推定手法について解説します.つぎに,同一次元オブザーバや外乱オブザーバ,定常カルマン・フィルタ(最適オブザーバ)の学習を通して,状態推定の勘所を学びます.
最後に,実応用上よく用いられる離散時間のカルマン・フィルタに焦点を当て,そのアルゴリズムと応用例,さらに,背後にある設計論について解説します.
| セミナ名 | 制御・設計対象 | 特徴 | 適用分野 | 推奨受講者 |
|---|---|---|---|---|
| 実習編 | 直流モータの角度制御 | Raspberry Piでモータ制御を学び,制御工学の基礎から応用までを網羅.Pythonで実装・検証が可能 | 教育用途,組込み制御,メイカーズ向けロボット開発,IoTデバイス |
ハンズオンで制御基礎を習得したい初心者/中級者 モノづくりを伴う学習をしたい方.教育関係者 |
| 状態フィードバック制御編 | 状態空間モデルの線形システム | 極配置法・最適レギュレータ・サーボ系設計を体系的に学び,Pythonで制御設計を体験 | 多関節ロボットアーム,航空機・ドローン,自動運転,医療機器,化学プラント,電力マネージメント・システム |
状態方程式ベースの制御設計に関心がある制御初心者 実務で最適制御を扱う技術者 |
| PID制御編 | 伝達関数モデルの線形システム | PIDの基本からゲイン・チューニング法,2自由度制御までをPythonで学び,制御設計も体験 | 工場設備,搬送装置,自律移動車,流量制御,温度制御,プロセス制御 |
伝達関数ベースの制御設計に関心がある制御初心者 実務でPID制御を扱う技術者 |
| ロバスト制御編 | モデル不確かさを含む線形システム | 不確かさのモデル化からH∞ノルム,スモール・ゲイン定理,ループ整形による制御設計までを学ぶ |
使用環境や特性が変化するシステムの制御 屋外ロボット,複雑システム,宇宙機の制御 |
モデル誤差や外乱に強いシステム設計をしたい実務者・応用研究者 |
| 状態推定編 | 観測不可能な内部状態を持つ動的システム | オブザーバ,カルマン・フィルタなどの状態推定手法を体系的に学ぶ | 自己位置推定,障害診断,状態監視システム,センサ・フュージョン |
センシング・推定技術に関心のある方 状態量を可視化して制御に活かしたい方 |
表1『Pythonで一緒に!ロボット制御のモデルベース設計』シリーズで学べる内容と対象分野.今回は上記表の「状態推定編」に該当する内容を実施する
 |
 |
|---|---|
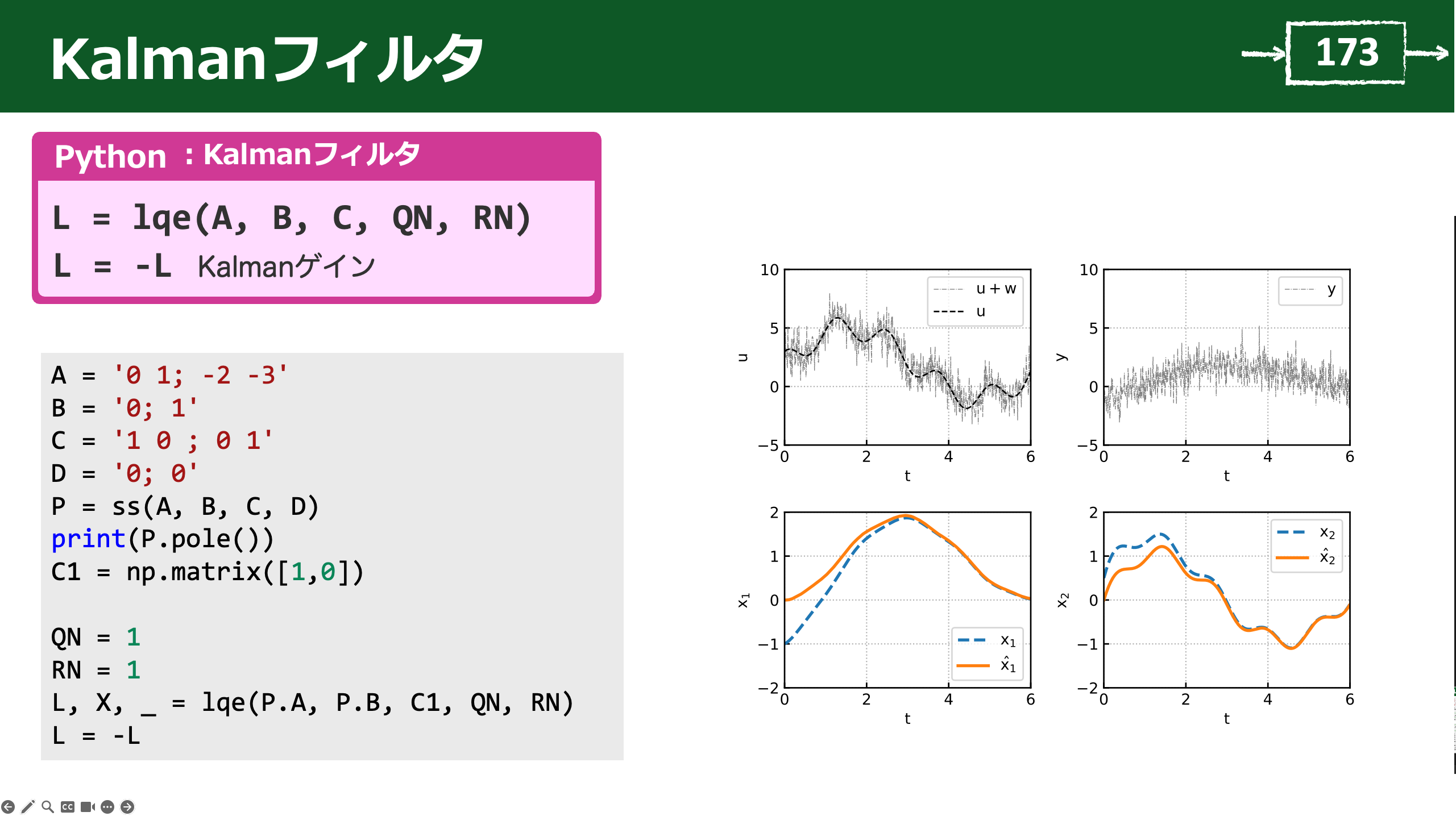
| 図2 同一次元オブザーバの構成と誤差ダイナミクス | 図3 Pythonを用いたカルマン・フィルタ設計の一例と,そのシミュレーション結果 |
アジェンダ
- セミナ概要
- 制御とは
- フィードバック制御
- 制御系設計の流れと勘所
- オブザーバ,カルマン・フィルタの実機デモ
- Pythonコードの書き方
- 設計モデル(伝達関数・状態方程式)
- 時間応答,周波数特性
- 制御系設計
- 正規分布,最小二乗推定
- 状態推定の必要性
- 可観測性
- オブザーバ,外乱オブザーバ
- H∞フィルタ,定常カルマン・フィルタ
- 離散時間の線形カルマン・フィルタ
- ベイズ推定
- 線形カルマン・フィルタの導出
(1)はじめに,制御工学の基礎
(2)実習キットを用いた状態推定実験
(3)制御工学クイック復習
(4)状態推定問題
(5)カルマン・フィルタ
(6)離散時間カルマン・フィルタの理解
受講対象
- 制御のための状態推定について知りたい方
- カルマン・フィルタの基礎を学びたい方
- RaspberryPiで状態推定の実験をしてみたい方
- Pythonで時系列データ処理や状態推定を体験したい方
あると望ましい予備知識
- 力学や電気回路の基礎(オームの法則を知っている)
- 複素関数の基礎(複素数の演算ができる)
- プログラミングの基礎(数行のコードを書いて実行したことがある)
- 制御工学の基礎(伝達関数や状態方程式を知っている,または【PID制御編】【状態フィードバック制御編】【ロバスト制御編】を受講している)
講演の目標
- 制御系設計(動きのデザイン)の基本的な方法を説明できる
- 状態を推定する方法を説明できる
- カルマン・フィルタのアルゴリズムを説明できる
- 簡単なPythonプログラムを作成できる
受講者が事前に準備するもの
- 筆記用具と計算用紙(ノート)
※適宜演習の時間を設けます
今後のセミナ予定
- Pythonで初めてのモデルベース制御系設計【ディジタル制御編】
講師紹介
略歴
2009年3月京都大学大学院情報学研究科博士後期課程修了.
日本学術振興会特別研究員(DC2),舞鶴工業高等専門学校助教,京都大学特定助教,
奈良先端科学技術大学院大学助教,大阪大学准教授などを経て,
2025年4月より兵庫県立大学大学院工学研究科電気電子工学専攻教授.
博士(情報学).一般社団法人みんなの制御塾代表理事.
関連製品
- [VOD/Pi4 KIT/Book]Pythonで一緒に!ロボット制御のモデルベース設計【実習編】
- [VOD/Book]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【フィードバック制御編】
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【ロバスト制御編】
主な著書
- Pythonによる制御工学入門改訂2版,オーム社 (2024)
- 制御系設計論,コロナ社 (2021)
- やさしくわかるシーケンス制御,オーム社(2020)
- Pythonによる制御工学入門,オーム社 (2019)
- 倒立振子で学ぶ 制御工学,森北出版 (2017)
- Arduino×Pythonで動かしながら学ぶモータ制御入門,トランジスタ技術2020年9月号