
|
|---|
実車実験!車載CANへのなりすまし攻撃
車載CANのプロトコル解析
防御設計と検知の実務的指針
|
|---|
|
図1 送信エラーの累積によってノードが自己隔離する「バスオフ」は,故障耐性を目的とした規定動作.復帰には一定の条件や手続きが必要.画像クリックで動画を見る.または記事を読む.[著]井上博之 詳細:[VOD] GPU/CPU/量子コンピュータによるサイバーセキュリティ実践プログラミング【セッション2】車載CANプロトコルのゼロ知識解析と実車への適用 |
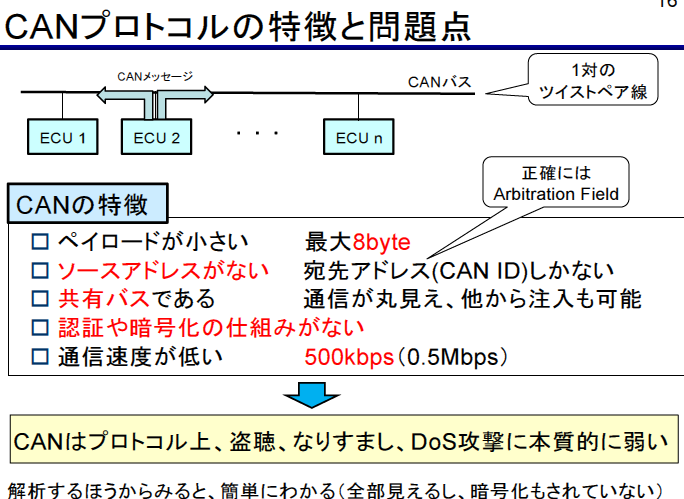
CANは車内ECUどうしが短いフレームをブロードキャストするバス・プロトコルです.送信エラーの累積によってノードが自己隔離する「バスオフ」は,故障耐性を目的とした規定動作です.バスオフ状態ではそのノードはバスへの送信を停止し,復帰には一定の条件や手続きが必要です.バスオフは正常な異常処理である一方,誤動作や悪意ある介入で頻発するとシステム機能低下を招くリスクがあります.
防御設計と検知の実務的指針
現場での安全確保にはネットワーク設計と検知が重要です. まず,重要ECUやドメインを論理的・物理的に分離し,ゲートウェイでトラフィックをフィルタリングします. 次に正常トラフィックのベースラインを取得して異常検知ルールを作成します.メッセージ頻度やID出現パターン,ペイロード分布を監視することで異常な注入や過負荷を早期検出できます.さらにメッセージ認証やシーケンス番号を導入することで改ざん耐性を高めます.
安全に学ぶための実験上の留意点
教育や研究目的で車載ネットワークを扱う際は法令遵守と安全確保が必須です.実車実験は所有者の明確な許可のもとで閉域試験環境またはシャーシ・ダイナモ上で行うことを推奨します.開発用は必ず隔離されたテストベンチを用い,実稼働ネットワークへ影響を及ぼさないようにします.ログ取得と事後解析のプロセスを整備することで現象の再現性と安全性が確保できます.
- ベースライン取得:正常時のID出現率やペイロード統計を記録しておくこと
- 監視とアラート:しきい値型と機械学習型を併用して検知精度を向上させること
- 分離と認証:重要ECUは論理的に分離し,可能であればメッセージ認証を導入すること
研究や教育は防御策の習得と健全なセキュリティ文化の醸成が目的です.攻撃手法の実演や運用は法的リスクを伴うため,常に防御・検知・改善の観点で学習を進めることを推奨します.
〈著:ZEPマガジン〉参考文献
- 強度128ビット! AES暗号セキュリティ・プログラミング入門,ZEPエンジニアリング.
- 宇宙ロケットの高セキュア暗号通信技術,ZEPエンジニアリング.