
|
|---|
今さら聞けない電子回路入門 コンピュータ自動制御の実験
距離や傾きを設定した値に保つフィードバック・システム
センサ(五感),マイコン(頭脳),モータ(筋肉)で構成する
|
|---|
|
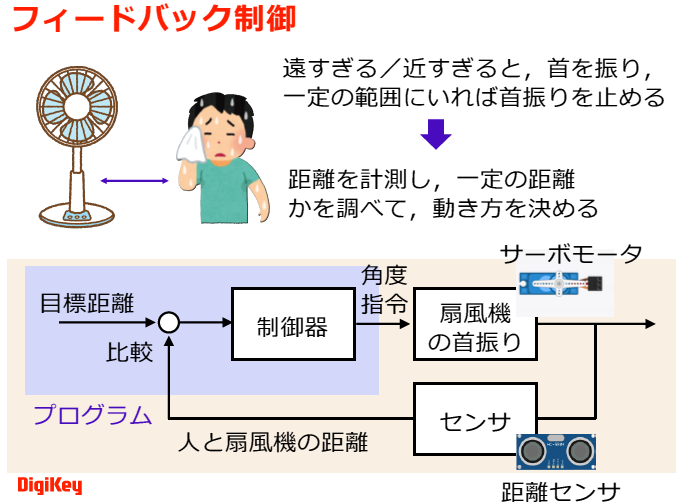
図1 センサで物理量(距離や傾きなど)を測ってマイコンに入力する.マイコンは目標値と測定値の差を見ながら,モータを回してシステムの状態が目標値に近づける.この一連の流れが「フィードバック制御」.画像クリックで動画を見る.または記事を読む.
詳しくは,DigiKeyチャンネル |
フィードバック制御とは?
フィードバック制御は,センサやマイコン,アクチュエータ(モータなど)を組み合わせて,目標値を達成するためにシステムを自動的に調整する制御方式です.
センサで現在の状態(距離や傾きなど)を測定し,その値をマイコンで処理します.目標値と測定値の差(誤差)をもとに,システムに適切な操作を加えることで,目標値に近づくよう調整します.この一連の流れが「フィードバック制御」と呼ばれる所以です.
距離を一定に保つフィードバック制御の実験
動画では,超音波距離センサとサーボモータを使用して,距離を一定に保つフィードバック制御の実験をしています.
センサのしくみ
超音波距離センサは,超音波を発し,前方の物体に跳ね返った音波を受信します.この反射波の往復時間$T$を計測し,音速$v \approx 331 \, \mathrm{m/s}$を用いて距離を算出します.距離$d$は次式で表されます: \[ d = \frac{v \cdot T}{2} \]
2. 制御の動作
測定した距離が10~20cmの範囲内であれば,サーボモータを90°に固定します.それ以外の距離では,モータが0°と180°の間を繰り返す動作を行います.
このような制御により,対象物の位置に応じてモータの動きを適応させるしくみを理解できます.
〈著:ZEPマガジン〉
チャプタ・リスト
- 1:10 フィードバック制御とは
- 1:57 距離情報でサーボモータを動かす
- 5:09 傾き角度情報でサーボモータを動かす
- 7:00 制御工学のすすめ
著者紹介
- 2009年3月 京都大学大学院情報学研究科博士後期課程修了.日本学術振興会特別研究員(DC2),舞鶴工業高等専門学校助教,京都大学特定助教,奈良先端科学技術大学院大学助教,大阪大学講師
- 2019年3月 大阪大学大学院工学研究科機械工学専攻准教授.ノイズシェーピング理論に基づく量子化器設計およびその応用に関する研究に従事.博士(情報学).
著書
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【ロバスト制御編】,ZEPエンジニアリング株式会社.
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】,ZEPエンジニアリング株式会社.
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【状態フィードバック制御編】,ZEPエンジニアリング株式会社.
- [VOD/Pi2W KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- Pythonによる制御工学入門(改訂2版),オーム社(2024).
- 制御系設計論,コロナ社(2021).
- やさしくわかるシーケンス制御,オーム社(2020).
- Pythonによる制御工学入門,オーム社(2019).
- 倒立振子で学ぶ 制御工学,森北出版(2017).
- Arduino×Pythonで動かしながら学ぶモータ制御入門,トランジスタ技術 2020年9月号,CQ出版社.
参考文献
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門,ZEPエンジニアリング株式会社.