
|
|---|
スピードマスタ・シリーズ
プロの技術を1日で!実習キット付きVOD
[VOD/Pi400 KIT] SLAMロボット&ラズパイ付き!ROSプログラミング超入門
LiDAR情報の取得から!定番OSで自己位置推定型の地図作成ロボットを1日開発
- 型名:mz-rosrobo-on3
- 仕様:実習キット,開発・実習用ソースコード,講義319分,解説144頁ほか
- 定価:66,000円(税込・送料無料)
- 著者・講師: 砂川 寛行/Hiroyuki Sunagawa
- 企画編集・制作: ZEPエンジニアリング株式会社
- 1人当たり1ライセンスです
- 関連製品:[VOD/Pi4 KIT] SLAMロボット&ラズパイ付き!ROSプログラミング超入門
- 関連製品:[VOD/KIT] SLAMロボット付き!ROSプログラミング超入門
- 関連製品:[VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門
- 関連製品:[VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門
- 関連製品:[VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門
- 関連製品:[VOD/Pi KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門
- 関連製品:[VOD/KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門
- 関連製品:[VOD/KIT]ラズパイ×Node-REDで作ろう!IoTアプリ開発入門
- 関連製品:[VOD/Pi3A KIT]ラズパイ・キットで学ぶLinux I/Oボードの作り方・探し方・動かし方
|

|
|
|---|
概要
本製品は,LiDAR搭載ロボット完成品と実習環境セットアップ済みラズベリー・パイを動かしながら,ROSの使い方からプログラミング技術,リアルタイム地図作成まで,ROSやSLAMの基本技術を1日でマスタできる講義ビデオ付きパーツセットです.
パーツセットに加え,5時間を超えるプロの技術者による丁寧な解説ビデオと,140頁を超える講義テキストが同梱されています.パーツセットはすべてはんだ付けずみで,工具やはんだごてなどがなくてもすぐに学習を始めることができます.
同梱の説明書(下記)には,講義ビデオや講義テキストの視聴を可能にするパスワードが記載されています.
なお,本製品は,2022年4月16日,ZEPエンジニアリングが開催した全国オンライン・セミナ「SLAMロボット&ラズパイ4付き!ROSプログラミング超入門」の講義ビデオ,講義テキスト,Raspberry Pi 400付き実習キットのセット商品です.
本製品のすべての映像,画像,文書テキスト,ソースコードは著作権法によって厳格に守られています.無許可の転載,複製,転用は法律により罰せられます.
ラズベリーパイをお持ちの場合は,下記の製品をご検討ください.
https://www.zep.co.jp/hsunagawa/movie/mz-rosrobo-on2
特徴1. 工具はいっさい不要!すぐに実験を始められる実習キット

|
|---|
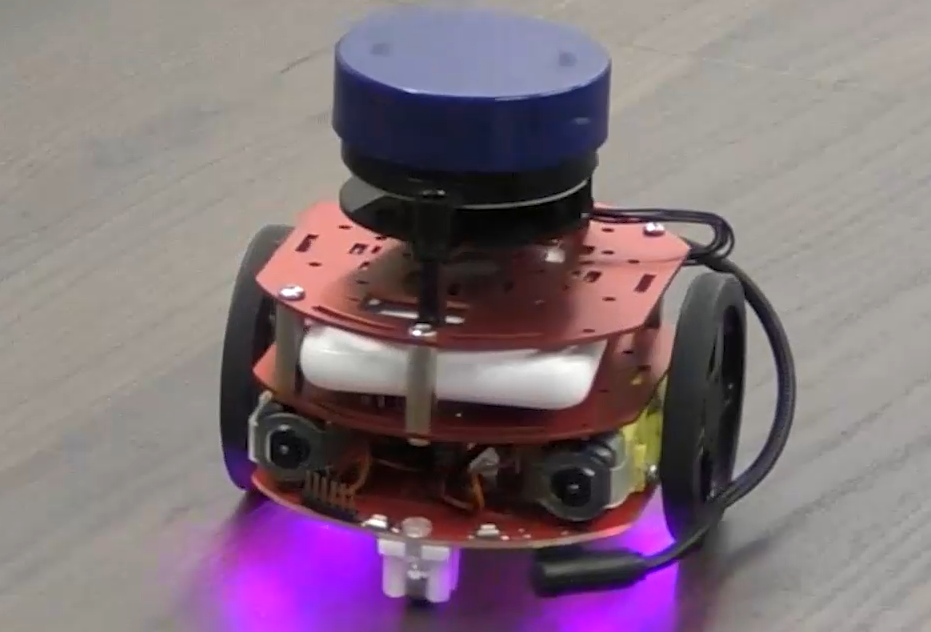
(1)LiDAR搭載ロボット完成品
- 360°レーザ・スキャナ YDLIDAR X2(専用USB変換基板とUSB Type-Cケーブルを含む)
- ESP32,モータ・ドライバ,6軸センサ,エンコーダ搭載基板
- ロボット本体&筐体
- モバイル・バッテリ
- ラズパイ接続&ロボット電源用USB Micro Bケーブル 2本
(2)Wi-Fiルータ TL-WR802N(LANケーブルとUSBケーブルを含む)&電源アダプタ
(3)ROS&プログラム・セットアップ済マイクロSDカード
(5)Raspberry Pi400モニタ用HDMIケーブル&電源アダプタ
特徴2 充実の講義テキスト(全144頁)
- ROSの概要
- ROSのしくみを理解する
- ラズベリー・パイでROSを動かす
- マイコン開発環境の準備
- ROSロボットの説明
- LiDARを動かそう
- ROSSerialの説明
- ROSロボットを動作させる
- SLAMの体験
- 参考書籍やセットアップ方法などの補助情報
特徴3.基礎から丁寧に解説!5時間超の講義動画
- 自己紹介と講義メニュー(6分54秒)
- ROSの概要と演習時の構成(9分56秒)
- ROSのしくみを理解する(4分25秒)
- ラズベリー・パイでROSを動かしてみる(51分27秒)
- マイコン開発環境の準備(8分58秒)
- ROSロボットの説明(52分2秒)
- LiDARを動かしてみる(37分34秒)
- ROSSerialの説明(29分41秒)
- ROSロボットを動かしてみる(1時間22分45秒)
- SLAMの体験(28分23秒)
- まとめ(1分20秒)
- Appendixの説明(4分35秒)
特徴4.確実に動く!講師のお手本ソースコード10本超
自分の手でソースコードを入力することはとても重要ですが,慣れるまでは,なかなか思うように動いてくれないものです.ロボット起動用プログラムからセンサ情報を表示するプログラム,ROSerialテスト用プログラムまで,講師が作成したソースコードを10本以上提供いたします.
講演の目標
- ROSの基本操作がマスタできる
- ROSを使ったロボットの概要が理解できる
- 自分で教材のロボットを改造したり,応用したりできるようになる
受講対象
- ラズベリー・パイやArduinoを使って電子工作をしたことはあるが,ROSを始められなかった方
- ROSを使ってみたが,モノを動かす前に挫折した方
- ROSを体験してみたい方
- 安価にROSを使ったロボットを作ってみたい方
実習に必要なもの
- HDMI対応のモニタ
- Raspberry Pi 400に接続するマウス
- LiDAR動作確認用プログラム.次のWebページで[Triangulation]→[YDLIDAR X2]→[TOOL]を選択して,LidarViewer_V0.3.5.zipをダウンロード後,任意のフォルダにLidarViewer_V0.3.5.exeを保存してください.
https://www.ydlidar.com/service_support.html
※スタンドアロンではなく,ご自身のパソコンでラズベリー・パイを操作したい場合は,VNC Viewerが必要です.
無線LANに対応しており,次のVNCアプリケーションが動作することを確認してください.
https://www.realvnc.com/en/connect/download/viewer/
本製品を購入された方へ
講義ビデオと講義テキストの視聴方法は,下記リンク先(青字)をクリックし,本製品同梱の説明書に書かれたパスワードを入力してください.
講義ビデオ(著作権保護のためパスワードがかけられています)
- 0:00:00 自己紹介と講義メニュー
- 0:07:04 ROSの概要と演習時の構成
- 0:17:00 ROSのしくみを理解する
- 0:22:34 ラズベリー・パイでROSを動かしてみる
- 1:14:02 マイコン開発環境の準備
- 1:23:00 ROSロボットの説明
- 2:15:02 LiDARを動かしてみる
- 2:52:36 ROSSerialの説明
- 3:22:17 ROSロボットを動かしてみる
- 4:54:02 SLAMの体験
- 5:13:25 まとめ
- 5:14:45 Appendixの説明
講義テキスト(著作権保護のためパスワードがかけられています)
ソースコード
ソースコードは,パーツセットに付属するマイクロSDカードに格納されています.ご自身のパソコンでソースコードを修正したい方は,esp_rosrobo_document.zipをダウンロードしてご利用ください.
紹介動画
| セミナの概要 |
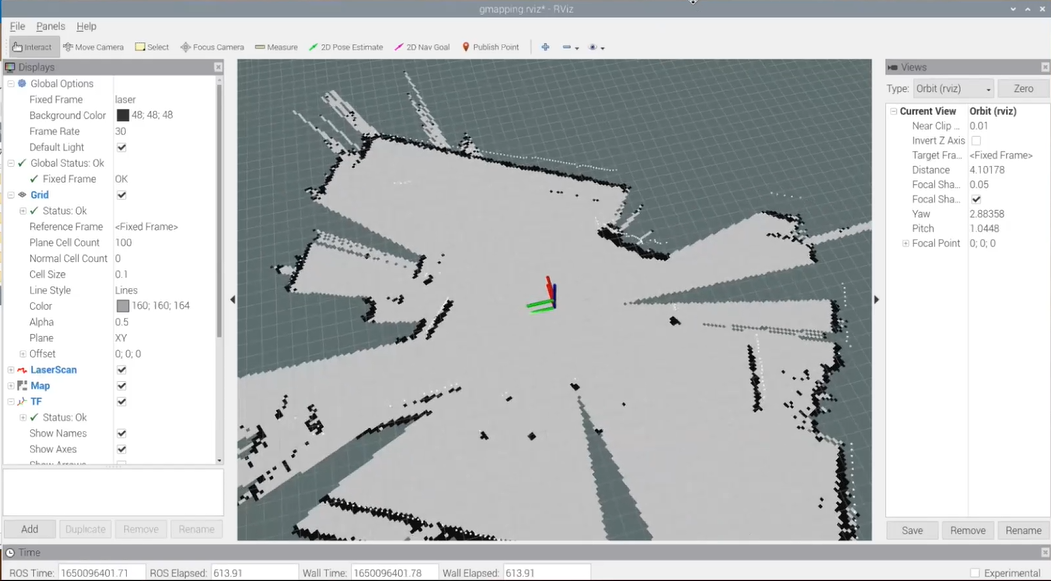
| ロボットからパブリッシュしている位置や姿勢情報を表示する |
| RVizで地図生成を確認する |
講師紹介
略歴
1994年 事務機器メーカ入社.事務機器のエレクトロニクス関連の開発設計に従事
主な著書
- 5ドルI/Oコンピュータ「ラズパイZero」の研究,トランジスタ技術2016年3月号,CQ出版社.
- 付録Xホビー・スパコンで科学の実験 プロローグ~第3章,トランジスタ技術2016年8月号,CQ出版社.
- 全実験室に!高IQアルディーノ基板(記事および付録基板設計),トランジスタ技術2017年2月号,CQ出版社.
- トラ技ポケコン「I/OSOLDIER」の製作,トランジスタ技術2018年2月号,CQ出版社.
- LiDARで自己位置推定!1万円自立移動ロボット「PiBoT」,トランジスタ技術2019年10月号から隔月連載,CQ出版社.
- スピード製作!初歩の遠隔制御ロボット,トランジスタ技術2020年12月号,CQ出版社.
関連製品
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門【mz-rosrobo-on3】
- [VOD/KIT]SLAMロボット付き!ROSプログラミング超入門【mz-rosrobo-on2】
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門【mz-matrobo-on1】
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門【mz-motor-on1】
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門【mz-edgeai-on1】
- [VOD/Pi KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門【mz-rasp-on1】
- [VOD/KIT]ラズパイ×Node-REDで作ろう!IoTアプリ開発入門【mz-node-on1】
- [VOD/KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門【mz-rasp-on2】
パーツキットと講義動画でプロの技術を1日習得
スピードマスタ・シリーズ
電子回路・基板設計からプログラミングまで,エンジニアがマスタすべき技術は多岐にわたり,開発期間も短くなっています.多くの書物を読み漁ったり,玉石混交のネット情報に振り回されたりしている暇はありません.
本シリーズには,各分野の一線で活躍する技術者が厳選したパーツセット,設計の要点を効率よく解説するセミナ動画,講義テキスト,お手本ソースコードなどが同梱されています.百戦錬磨の技を一見することで,未経験の技術が驚くほど短時間で身につくだけでなく,信頼性の高いシステム開発に必要なプロの眼が養われます.