











ロボティクス入門 エンコーダで回転を測る
回転方向/角度/速度を測る最重要センサ
ロボットの最重要センサ「エンコーダ」
 |
|---|
| 図1 エンコーダは,回転運動の位置,角度,速度を正確に計測するために不可欠なセンサ.「光学式エンコーダ」を例に,その構造と測定メカニズムを解説する.[著・提供]南 裕樹.画像クリックで動画を見る.または記事を読む.詳細は[VOD/Pi4 KIT/Book]Pythonで一緒に!ロボット制御のモデルベース設計【実習編】 |
エンコーダの基本構造と役割
エンコーダは,ロボティクスにおいて回転運動の位置,角度,速度を正確に計測するために不可欠なセンサです.特に,ロータリ・エンコーダは回転角度や回転速度を測定し,ロボットの精密な動作制御に使用されます.主に「光学式」と「磁気式」の2種類があり,それぞれの方式で回転を検出します.
光学式エンコーダは,回転盤に取り付けられたスリット(穴)を通して,発光ダイオードから放射された光がフォトダイオードに到達するかどうかを検出します.これにより,パルス信号が生成され,回転角度や速度を計測することが可能です.一方,磁気式エンコーダは,磁石とホール素子を利用して,磁場の変化を検出し,同様に回転角度を測定します.
インクリメンタル型とアブソリュート型
エンコーダは大きく「インクリメンタル型」と「アブソリュート型」に分けられます.
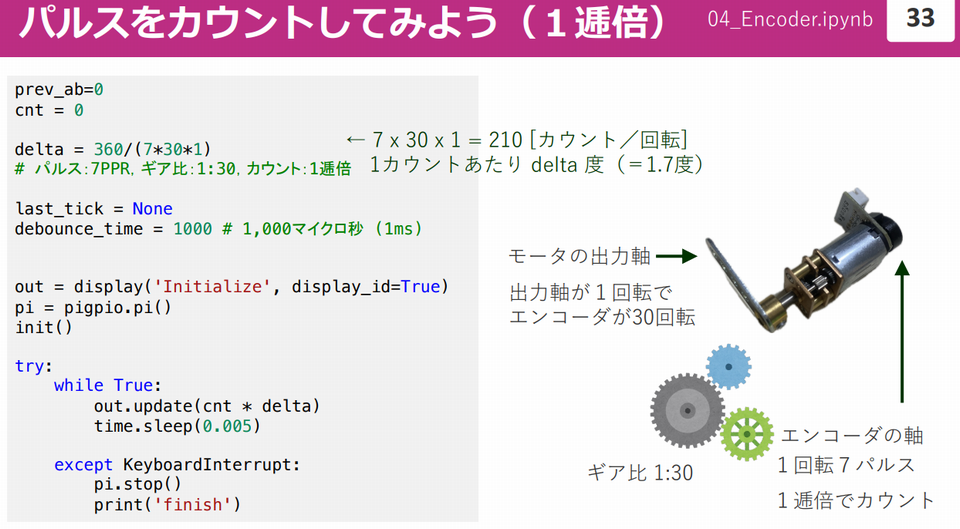
インクリメンタル型は回転に応じたパルス信号を出力し,そのパルス数をカウントすることで角度を測定します.例えば,1回転180パルスのエンコーダの場合,1パルスあたりの角度は $2^\circ$ となり,$90$ パルスで $180^\circ$ の回転を示します.回転速度はパルス信号の周波数を調べることで測定可能で,パルスの周波数が高いほど回転速度が速いことを意味します.
アブソリュート型は,回転の絶対位置をコードとして出力するため,電源が遮断されても回転位置を保持できます.これは,ロボットが再起動後も正確に動作を継続するために非常に重要です.
回転方向の検出と逓倍原理
エンコーダの多くは,回転方向の検出が可能です.
これは,A相とB相と呼ばれる2つのパルス信号を比較することで実現されます.A相とB相は1/4周期ずれており,どちらの信号が先に来るかを判断することで回転方向を特定します.また,逓倍原理を用いることで,エンコーダの精度をさらに向上させることが可能です.例えば,4逓倍では,1つのパルスに対して4倍の精度で角度を測定できます.これは,以下の数式で表されます.
\begin{align*}
\Delta \theta
=
\frac{360^\circ}
{\text{PPR} \times \text{ギア比} \times 4}
\end{align*}
ここで,PPRはパルス数を示します.
エンコーダの回転速度と方向検出のしくみ
パルス信号による回転速度の測定
エンコーダは,回転軸の角度や速度を正確に測定するための主要なデバイスです.
特に光学式インクリメンタルエンコーダでは,スリット付きの回転盤が光を遮ることでパルス信号を生成します.このパルス信号の周波数は回転速度に比例します.例えば,パルス数が増加すれば,それに応じて回転速度も速くなります.このようにして,パルス信号の周波数を解析することで,回転速度をリアルタイムで把握できます.
エンコーダの角度測定の精度は,パルス数に依存します.例えば,1回転に対して180パルスのエンコーダを使用する場合,1パルスあたり $2^\circ$ の角度を検出することが可能です.
逓倍方式による精度向上
エンコーダの精度は,逓倍方式を用いることで劇的に向上します.逓倍方式では,パルス信号の立ち上がりと立ち下がりを検出することで,1パルスあたりの角度分解能を高めます.例えば,4逓倍のエンコーダでは,1パルスに対して4倍の分解能が得られます.具体的には,PPR(パルス数)を用いて角度を以下の数式で求めます.
\begin{align*}
\Delta \theta &= \frac{360^\circ}{\text{PPR} \times \text{ギア比} \times 4}
\end{align*}
ここで,ギア比と逓倍数が角度分解能に大きく影響します.
回転方向の検出と制御
エンコーダでは,回転方向を検出することも可能です.A相とB相という2つの信号を使用して,どちらが先に立ち上がるかで回転方向が決まります.このしくみを用いて,ロボットは回転方向を正確に把握し,逆回転や停止などの制御を容易に行うことができます.
このように,エンコーダはロボティクスの重要なセンサとして,回転の位置,速度,方向の検出を可能にし,高精度な制御を実現します.〈ZEPマガジン〉
著者紹介
- 2009年3月 京都大学大学院情報学研究科博士後期課程修了.日本学術振興会特別研究員(DC2),舞鶴工業高等専門学校助教,京都大学特定助教,奈良先端科学技術大学院大学助教,大阪大学講師
- 2019年3月 大阪大学大学院工学研究科機械工学専攻准教授.ノイズシェーピング理論に基づく量子化器設計およびその応用に関する研究に従事.博士(情報学).
著書
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【ロバスト制御編】,ZEPエンジニアリング株式会社.
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】,ZEPエンジニアリング株式会社.
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【状態フィードバック制御編】,ZEPエンジニアリング株式会社.
- [VOD/Pi2W KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- Pythonによる制御工学入門(改訂2版),オーム社(2024).
- 制御系設計論,コロナ社(2021).
- やさしくわかるシーケンス制御,オーム社(2020).
- Pythonによる制御工学入門,オーム社(2019).
- 倒立振子で学ぶ 制御工学,森北出版(2017).
- Arduino×Pythonで動かしながら学ぶモータ制御入門,トランジスタ技術 2020年9月号,CQ出版社.
参考文献
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門,ZEPエンジニアリング株式会社.