
|
|---|
制御工学計算ライブラリPython Controlのススメ
ラズパイ×Pythonモータ制御プログラミング入門
Python-Controlライブラリのあらまし
|
|---|
|
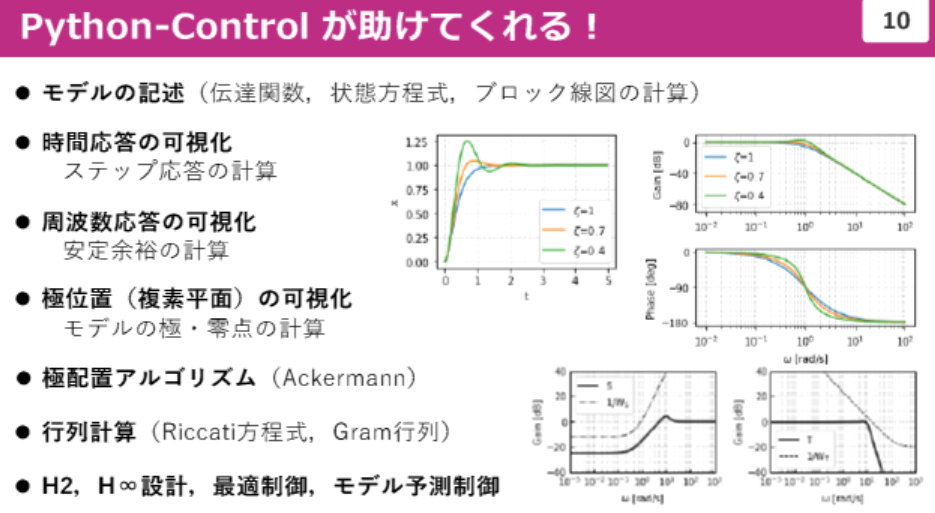
図1 Python-Controlは制御工学の計算やシミュレーションをPython上で実行できるライブラリ.時間応答の可視化,ステップ応答や周波数応答の計算,安定余裕の評価などが行える.画像クリックで動画を見る.または記事を読む.[提供・著]南裕樹 詳細:[VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門 |
Python-Controlは制御工学の計算やシミュレーションをPython上で実行するためのライブラリです.時間応答の可視化,ステップ応答や周波数応答の計算,安定余裕の評価などを簡単に行えます.伝達関数や状態方程式,ブロック線図といったモデルの記述も可能で,極や零点の解析,極配置アルゴリズム(Ackermann)やリッカチ方程式,H2/H∞制御設計,モデル予測制御まで幅広く対応しています.これにより,教科書や演習で学ぶ制御理論を実際の数値計算やシミュレーションで確認できます.
モータ制御への応用
ラズベリー・パイとPython-Controlを組み合わせることで,モータ制御の学習が効率的に行えます.制御対象をPython上でモデル化し,時間応答やステップ応答を確認することで,制御パラメータの調整が直感的に理解できます.制御対象がDCモータやI2C接続のアクチュエータの場合も,$V_{in}$や$L_r$などのシステム・パラメータを設定してシミュレーション可能です.極や零点の配置を可視化することで,制御系の安定性や応答特性の理解も深まります.
Python-Controlで行える主要計算
- 時間応答計算:ステップ応答やインパルス応答の可視化
- 周波数応答解析:ボード線図やナイキスト線図の作成
- 安定性評価:ゲイン余裕・位相余裕の計算
- モデル記述:伝達関数,状態方程式,ブロック線図の作成
- 極・零点解析:極・零点の計算と複素平面上の可視化
- 極配置:Ackermannアルゴリズムによる状態フィードバック設計
- リッカチ方程式:制御ゲイン算出や最適制御設計
- H2/H∞設計:性能や安定性を考慮した最適制御
- モデル予測制御:予測モデルに基づく制御入力生成
- シミュレーション結果の可視化:応答波形や制御入力のグラフ表示
学習の進め方
Python-Controlは数値計算ライブラリNumPyやSciPyに依存しており,Python環境で簡単に動作します.まずは簡単な制御モデルを構築し,ステップ応答や極配置を確認することで制御理論の理解を深めます.その後,ラズベリー・パイで実際のモータに制御信号を適用し,計算結果と実際の動作を比較することが効果的です.この手順により,理論と実践を結び付けたモータ制御学習が可能です.
〈著:ZEPマガジン〉参考文献
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門,ZEPエンジニアリング株式会社.