
|
|---|
制御器設計の第1歩モータの数式化から始める
ラズパイ×Pythonモータ制御プログラミング入門
モータ制御の第1歩:数学モデルによる理解
|
|---|
|
図1 電気的および機械的なエネルギ変換を行う直流モータの動作は,2階の微分方程式で表すことができる.画像クリックで動画を見る.または記事を読む.[提供・著]南裕樹 詳細:[VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門 |
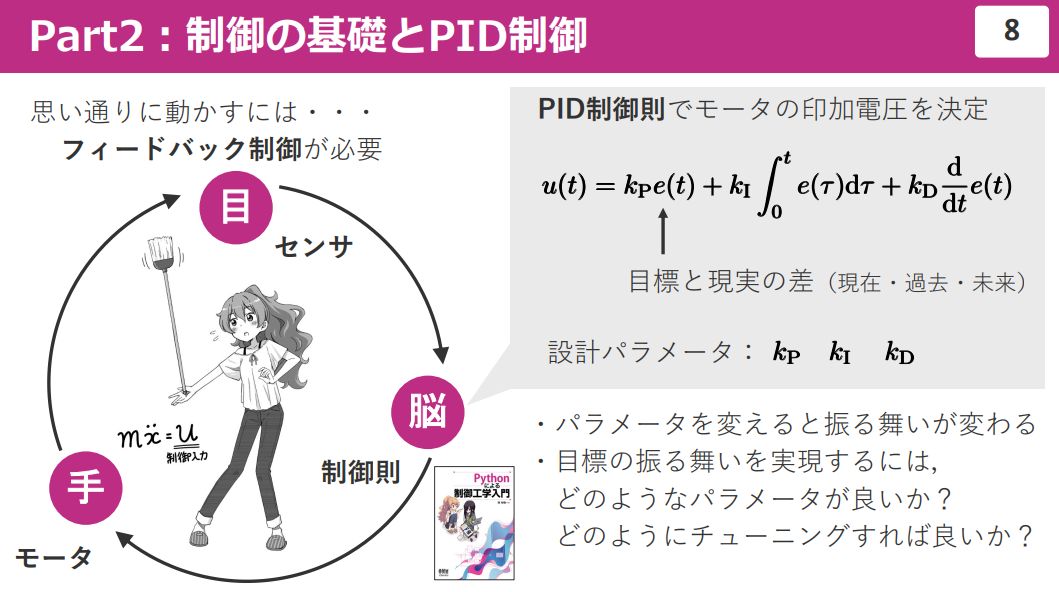
モータを制御するためには,まずモータの動作を数式で表現することが重要です.直流モータ(DCモータ)は,電気的および機械的なエネルギ変換を行う装置であり,その動作は2階の微分方程式で表すことができます.この数式モデルはモータの電流,トルク,角速度といった物理量の関係を定量的に記述するものです.
数式で表されたこの関係を「数学モデル」と呼びます.制御工学では,このモデルを利用してモータのふるまいを解析し,最適な制御器を設計するための基礎とします.たとえば入力電圧$V_{in}$と出力角速度$\omega$の関係を伝達関数として整理することで,制御系の安定性や応答特性を評価できるようになります.
伝達関数と状態方程式の役割
モータの数学モデルは,伝達関数または状態方程式の形に変換して扱うことが一般的です.伝達関数は入力と出力の関係を周波数領域で表すものであり,フィードバック制御の設計やゲイン調整に役立ちます.一方,状態方程式はモータの内部状態を時間領域で追跡できるため,状態フィードバック制御などに用いられます.
これらのモデルを基にして,次のような制御手法を学ぶことができます.
- モデル・マッチング法:目標応答に一致するよう制御器を設計する
- 状態フィードバック制御:モータ内部の状態変数を観測・制御する
- 極配置法:システムの応答特性を安定かつ高速に設定する
- 最適制御:エネルギ消費や誤差を最小化する設計を行う
さらに応用的な領域では,ループ整形法や積分型サーボ・オブザーバなど,より高度な設計手法も用いられます.これらはいずれも数学的な解析と線形代数の理解が不可欠です.
Pythonとラズパイによる制御設計
数学モデルを手作業で解析するのは容易ではありませんが,Pythonのライブラリを利用することで大部分の計算を自動化できます.たとえば制御系設計用のライブラリを用いれば,伝達関数の作成,状態方程式の解析,極配置や最適化計算を容易に実行できます.これにより,理論を理解しながら実際にモータを動かすプログラムを試すことが可能です.
ラズベリー・パイを使えば,Pythonで書いた制御アルゴリズムを実際のモータドライバと接続して動作を確認できます.I$^2$C通信などを用いてモータの状態を取得し,フィードバック制御を実装することで,理論と実機の動きを結びつけることができます.
このように,数式モデルの理解から始まり,Pythonによる制御設計と実装へと進めることで,制御工学の全体像を実践的に学ぶことができます.
〈著:ZEPマガジン〉参考文献
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門,ZEPエンジニアリング株式会社.