











ロボティクス入門 現実にモデルを近付ける
理想に「不確かさ」を足す
モデルベース設計の準備:理想に不確かさを加えたモデルを用意する
 |
|---|
| 図1 ロボットのモデルベース設計の前提は,制御対象のモデルの動特性が正確に表されていることだが,複雑なシステムの特性を完璧にモデル化することはできない.ロバストな制御システムは,実際の制御対象と理想との差分「不確かさ」に対応したモデルを用意して,モデルベース開発を行うことで設計が可能だ.[著・提供]南 裕樹.画像クリックで動画を見る.または記事を読む.詳細は[VOD/Book]Pythonで一緒に!ロボット制御のモデルベース設計【ロバスト制御編】 |
ロボティクス入門:モデルベース設計と不確かさの考慮
モデルベース設計は,ロボティクスにおける制御システム開発の要となる手法です.この設計手法では,システムの動特性が数式モデルで正確に表現されていることが前提条件になりますが,実際のシステムには必ず「不確かさ」が存在します.不確かさとは,モデルが理想的でないことを指し,現実の物理現象を完全に再現できない部分や,外乱やノイズが含まれる状況のことを意味します.
モデルの理想化と現実とのギャップ
モデルベース設計の初期段階では,ロボットの物理的特性を数学的に表現するため,理想化されたモデルが使用されます.この理想化モデルでは,物体の質量,摩擦,リンクの剛性などが厳密に定義されますが,実際のロボットの動作環境ではこれらのパラメータは変動することが多く,モデルの不確かさが発生します.この不確かさを無視すると,ロボットの制御性能が期待とおりに発揮できず,システム全体の安定性が損なわれる可能性があります.
モデルと現実のギャップを埋めるためには,「ロバスト制御」という手法が有効です.ロバスト制御では,モデルが完全でないことを前提とし,外乱やパラメータの不確かさに対しても安定した制御を行うことを目指します.この際,感度関数や相補感度関数を使用して,システムが外乱やノイズに対してどの程度強固であるかを評価します.
感度関数と相補感度関数
ロボティクスの制御システムにおける「感度関数」 $S(s)$ は,外乱やノイズの影響を表します.感度関数が低いほど,システムは外乱に対して強くなります.逆に,「相補感度関数」 $T(s)$ は,システムの追従性能を示し,目標値に対する応答の良さを示します.
\begin{align}
S(s) &= \frac{1}{1 + G(s)K(s)}
\\
T(s) &= \frac{G(s)K(s)}{1 + G(s)K(s)}
\end{align}
ここで,$G(s)$ はシステムの伝達関数,$K(s)$ は制御器の伝達関数です.理想的には,感度関数 $S(s)$ は低周波数帯で低く保ち,外乱を抑えつつ,高周波数帯では相補感度関数 $T(s)$ を高くし,目標値に素早く追従できることが望ましいとされます.
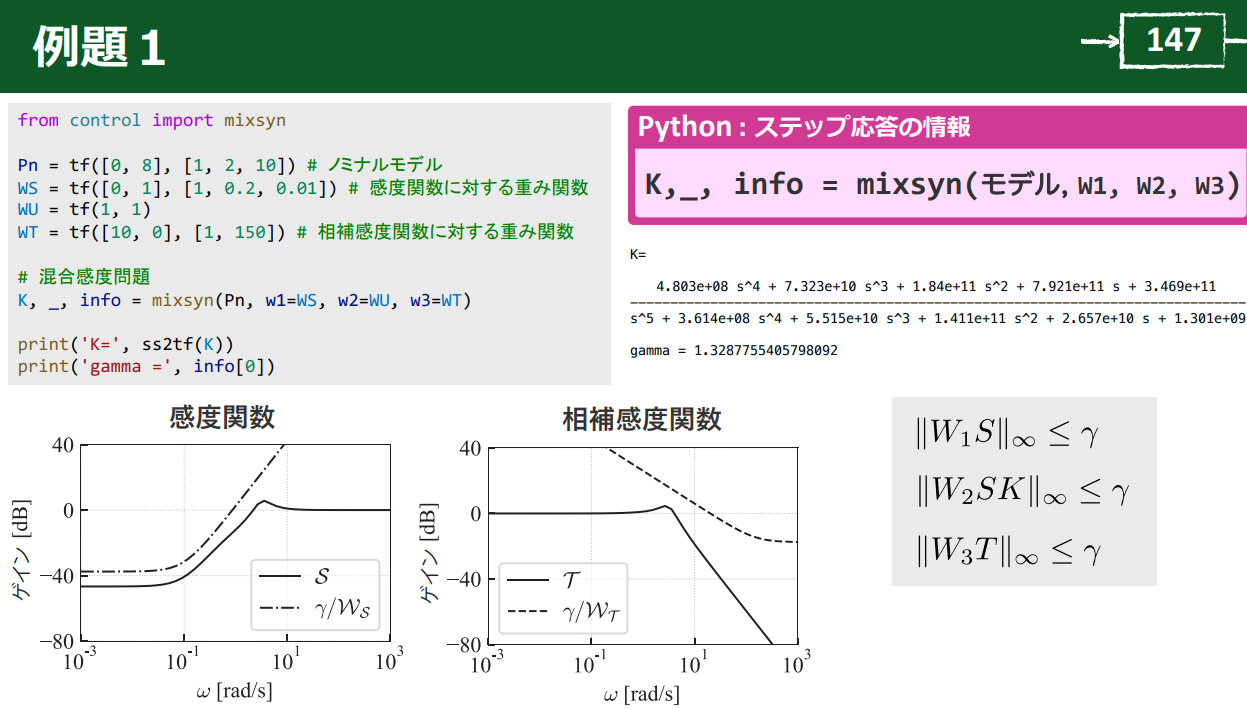
混合感度問題
実際のロボティクス・システムでは,複数の制御目標が相互に競合することがあります.例えば,低周波数帯では外乱の抑制が重要ですが,高周波数帯では目標追従が優先されることが多いです.このような場合,「混合感度問題」を解くことで,外乱抑制と目標追従のバランスを取ることが可能になります.混合感度制御では,感度関数 $S(s)$ や相補感度関数 $T(s)$ に重みをつけ,それらのバランスを最適化します.
ロボット制御における不確かさとロバスト制御
ロボティクスの制御システム設計では,常にモデルと現実の間に不確かさが存在します.この不確かさに対応するため,ロバスト制御の導入が不可欠です.ここでは,ロバスト制御がどのようにして不確かさを考慮し,制御性能を向上させるかを考えてみましょう.
不確かさの種類とその影響
不確かさは,システムのパラメータに対する変動や,外乱,ノイズなどが原因で生じます.例えば,バネ定数が±20$%$変動する状況では,ロボットの動作特性に予想外の変化が生じ,モデルが現実の挙動を正確に再現できなくなることがあります.このような不確かさは,システムの安定性を低下させ,振動やオーバーシュートを引き起こす可能性があります.
ロバスト制御では,これらの不確かさに対応するため,「H∞制御」や「LQR制御」といった高度な手法が用いられます.H∞制御は,感度関数 $S(s)$ の 「H∞ノルム」を最小化し,システムが外乱に対してどの程度ロバストであるかを評価します.
\begin{align}
\| S(s) \|_{\infty}
< \gamma
\end{align}
ここで,$\gamma$ は許容範囲を示すパラメータです.この制御では,$\gamma$ を適切に設定することで,外乱抑制性能を向上させることができます.
モデルの精度と外乱抑制
モデルベース設計では,システムの動作特性をいかに正確にモデル化できるかが重要です.しかし,パラメータのばらつきや未知の外乱を完全に取り除くことは難しく,最終的には制御システムがその不確かさにどれだけ耐えられるかが鍵になります.ロバスト制御を導入することで,モデルの精度が低くても安定した動作を確保することが可能です.〈著:ZEPマガジン〉
著者紹介
- 2009年3月 京都大学大学院情報学研究科博士後期課程修了.日本学術振興会特別研究員(DC2),舞鶴工業高等専門学校助教,京都大学特定助教,奈良先端科学技術大学院大学助教,大阪大学講師
- 2019年3月 大阪大学大学院工学研究科機械工学専攻准教授.ノイズシェーピング理論に基づく量子化器設計およびその応用に関する研究に従事.博士(情報学).
著書
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【ロバスト制御編】,ZEPエンジニアリング株式会社.
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】,ZEPエンジニアリング株式会社.
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【状態フィードバック制御編】,ZEPエンジニアリング株式会社.
- [VOD/Pi2W KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- Pythonによる制御工学入門(改訂2版),オーム社(2024).
- 制御系設計論,コロナ社(2021).
- やさしくわかるシーケンス制御,オーム社(2020).
- Pythonによる制御工学入門,オーム社(2019).
- 倒立振子で学ぶ 制御工学,森北出版(2017).
- Arduino×Pythonで動かしながら学ぶモータ制御入門,トランジスタ技術 2020年9月号,CQ出版社.
参考文献
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門,ZEPエンジニアリング株式会社.