
|
|---|
フィードバック制御のメリット:目標値追従/外乱抑制/安定化
ラズパイとPythonで一緒に!センサ・フュージョン入門
フィードバック制御の基本構造
|
|---|
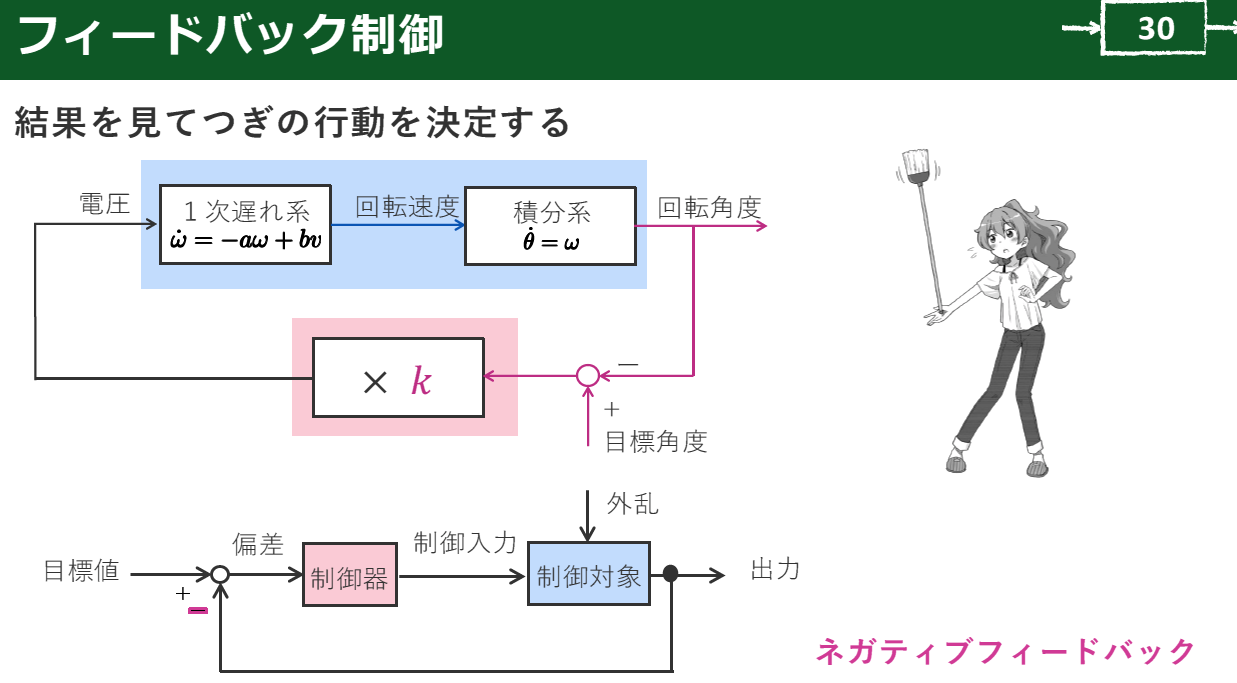
| 図1 フィードバック制御では,観測できる量が制御性能を左右する.回転角度を直接使う場合もあれば,角速度の情報を併用する場合もある .画像クリックで動画を見る.または記事を読む.詳細はVOD/Pi KIT/data]ラズパイとPythonで一緒に!カルマン・フィルタ&センサ・フュージョン入門 |
フィードバック制御は,出力された情報を入力の決定に使う制御方式です.対象の状態を観測し,その情報をもとに操作量を更新します.目標値と現在の状態との差を評価し,その差が小さくなる方向へ入力を与えます.この情報の循環がフィードバックです.制御対象,制御器,観測という要素が明確にわかれ,教科書ではブロック図として整理されます.
フィードバック制御では,観測できる量が制御性能を左右します.回転角度を直接使う場合もあれば,角速度の情報を併用する場合もあります.必要な状態が直接得られないときは,オブザーバを使って状態を推定します.推定された状態を制御入力の計算に使う構成が一般的です.このとき,状態推定と制御は切り離せない関係です.
目標値追従の役割
目標値追従は,フィードバック制御の代表的な役割です.あらかじめ与えた目標値に対して,状態が近づくように操作を更新します.目標値を変えると,状態もそれに応じて変化します.この挙動は,目標と状態の差を使って操作を決める構造から生まれます.
ラズパイとPythonを用いた実験環境では,目標値を変数として与え,その変化に対する応答を観察できます.状態が目標へ滑らかに近づくか,振動するか,遅れるかといった挙動は,制御器の設計に依存します.目標値追従は,制御系の基本性能を確認する指標です.
- 目標値:望ましい状態を数値で与える量です
- 偏差:目標値と現在状態との差です
- 追従:偏差が小さくなる方向へ状態が動く性質です
外乱抑制と安定化の役割
外乱抑制もフィードバック制御の重要な役割です.外乱は,負荷変動や環境変化のように,意図せず加わる影響です.外乱が加わると状態は一時的に乱れます.フィードバック制御では,乱れた状態を観測し,操作を更新することで元の状態へ戻します.外乱があっても目標付近に留まる性質が外乱抑制です.
安定化は,不安定な対象を扱うための役割です.入力を与えないと状態が発散する対象も存在します.姿勢が崩れやすい系や,バランスを失いやすい系が該当します.フィードバック制御は,状態が逸脱しそうになると修正操作を加えます.この作用によって,対象は一定の状態に保たれます.安定化は,制御が成立する前提条件です.
- 外乱抑制:外部からの影響を受けても状態を戻す役割です
- 安定化:放置すると発散する状態を保つ役割です
- 共通点:状態の変化を観測して操作を更新する構造です
センサ・フュージョンとフィードバック制御
実際の制御では,単一のセンサ情報だけでは不十分な場合があります.複数センサの情報を統合し,状態を推定します.この推定値をフィードバック制御へ渡します.センサ・フュージョンは,目標値追従,外乱抑制,安定化のすべてを支える基盤です.
ラズパイとPythonを使う構成では,センサ読み取り,状態推定,制御入力計算を周期的に実行します.周期が安定すると,フィードバック制御の効果も安定します.制御性能は推定の品質に依存するため,推定と制御を一体として設計する視点が重要です.
〈ZEPマガジン〉参考文献
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門,ZEPエンジニアリング株式会社.