
|
|---|
衛星+地上基準局!一般的なRTK測位システムの構成
単独高精度測位 みちびき補正信号CLAS入門
基準局が不要なCLAS
|
|---|
|
図1 準天頂衛星「みちびき」が提供するCLAS(Centimeter Level Augmentation Service)は,基準局を自前で用意しなくても済む測位方式.画像クリックで動画を見る.または記事を読む.[著]岡本 修 詳細:[VOD] センチメートル測位RTKのしくみと開発技術 |
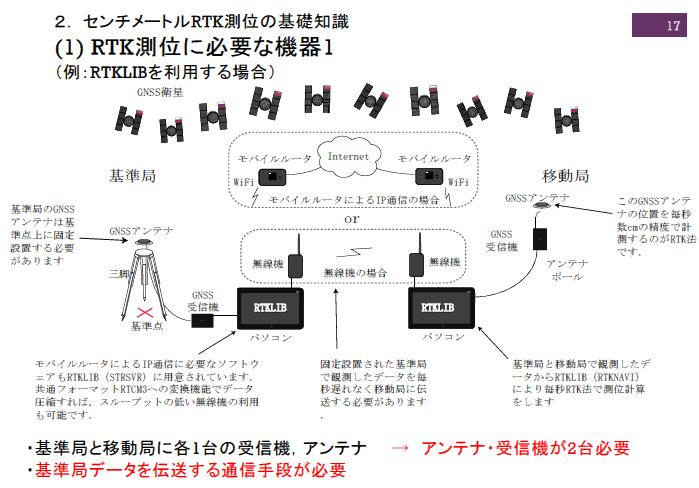
RTK(Real-Time Kinematic)測位では,移動局と基準局という2台のGNSSレシーバを用います. 高精度な位置をリアルタイムで得るには,単独測位ではなく,基準局からの補正情報が不可欠です. この補正情報を移動局にタイムラグなく伝えることが,RTKの前提条件です.
基準局は,位置が既知の点に設置されたGNSSアンテナとレシーバで構成されます. 観測されたデータは,通常5秒以内に移動局へ送信されなければなりません. 通信手段としては,モバイル・ルータによるインターネット経由の配信が一般的ですが,山間部や災害時には無線機を用いた運用も行われています.
RTKシステムには以下の要素が必要です.
- 移動局用GNSSレシーバとアンテナ
- 基準局用GNSSレシーバとアンテナ
- 基準局データを移動局に送信する通信手段
商用の基準局サービスを使うことで,自前で基準局を設ける必要がない場合もあります. たとえば「基準局掲示板」などで公開されているオープン基準局を利用できます.
単独高精度測位と受信機の要件
RTK測位には,搬送波位相の観測が可能な受信機が必要です. カーナビやスマートフォンに搭載される一般的なGNSSチップでは,コード測位だけが可能であり,RTKのようなcm級の精度は得られません.
2010年ごろには,1周波・シングルバンドの安価なGNSS受信機が登場し,外部ソフトウェアと組み合わせることでRTK測位を目指す試みが始まりました.
たとえばRTKLIBというオープンソースの測位エンジンを活用することで,ハードウェア側に測位計算機能をもたせずにRTKを実現できます. 初期はボードノイズにより位置が安定せず,多くの試行錯誤が必要でしたが,フィルタリングなどの工夫によって安定した測位が可能になりました.
まとめ
RTK測位は,単独のレシーバだけでは実現できない高精度技術です. 最低2台のGNSSレシーバと通信設備が必要であり,補正情報の正確な伝送が重要です. 搬送波位相の観測が可能な機材と,適切な基準局の選定が精度確保の鍵です.
RTK測位における基準局の役割
RTK測位でもっとも重要な要素の1つは「基準局」です. 基準局は,絶対座標が正確に既知である地点にGNSS受信機を設置して運用されます. この受信機は,みちびきやGPSなどの衛星信号を観測し,位置の変化をリアルタイムに記録します.
この基準局が収集するのは,搬送波位相の情報です. 搬送波とは,GNSS衛星が送信する高周波の電波であり,これを受信機が測定することで,非常に高い位置精度が得られます. しかし,これらの観測値は単体では意味をもちません. 移動局と比較することで初めて相対的な位置が導出されるからです.
この比較の際に不可欠となるのが,基準局から移動局へのデータ伝送です. 伝送は一般的に以下の手段で行われます.
- モバイル・ルータを使ったインターネット経由の配信
- 業務用無線機による直接通信
- 商用サービスやオープン基準局のインターフェースを通じた利用
RTK測位では,これらの手段によって秒単位の遅延で補正データを取得する必要があります. この遅延が大きくなると,移動局の測位精度が著しく低下します.
搬送波観測が可能なレシーバは,数万円台から市販されており,たとえばF9PやMosaicのような製品がその代表です. しかし,安価なレシーバを使用する場合には,ノイズ対策や適切なアンテナの設置が不可欠です.
基準局とCLAS
準天頂衛星「みちびき」が提供するCLAS(Centimeter Level Augmentation Service)は,基準局を自前で用意しなくても済む測位方式です. みちびきの衛星から直接,広域に補正情報が配信されるため,移動局単体でも高精度測位が可能になります.
CLASとRTKの違いは以下の点にあります.
- CLASは全国共通の補正情報を提供するが,RTKはローカルな基準局を使う
- CLASはみちびき対応受信機で単独使用できるが,RTKは2台の受信機が必要
- RTKは理論的にCLASより高精度な測位が可能
これにより,RTKは建設・測量など精度が求められる分野で多用されており,CLASはそれよりやや広範で汎用的な用途に向いています.
まとめ
RTKにおけるキーワードは「基準局」です. この局が搬送波情報をリアルタイムで提供し,それを移動局と比較することで,数センチ精度の測位が実現します. 基準局の安定性,通信品質,機器の選定がすべての精度を左右します. 〈著:ZEPマガジン〉
著者紹介
- 1993年 西松建設(株)技術研究所研究員
- 2000年 茨城工業高等専門学校助手
- 2002年 博士(工学)「リアルタイム・キネマティックGPS測位の建設工事における応用に関する研究」,主に建設業における高精度衛星測位の応用において,1周波RTK測位の普及等の低価格化,遮へいやマルチパスの多い環境におけるセンチメータ級測位の応用,誤差補正法に取り組む.RTK-GPSの誤差補正法等で2001年日本測量協会測量技術奨励賞,地下埋設物可視化システムの開発で2019年土木学会技術開発賞を受賞
- 2020年 静岡大学土木情報学研究所客員教授
- 詳細
著書
- 高精度衛星測位の性能と応用事例,日本ロボット学会誌,37(7),pp.15~20,2019.7.
- 衛星測位を利用した土壌汚染状況調査における調査地点設定システム,測量,65(12),pp.14-17,2015.12.
- 電波の悪い森の中でも美軌道測位,トランジスタ技術2019年10月号,別冊,pp.2~3,CQ出版社.
- 最新RTKレシーバFi×性能対決,トランジスタ技術2019年2月号,pp.41~45,CQ出版社.
- センチ・メートル測位RTK法の基礎と実力,トランジスタ技術2016年2月号,pp.66~79,CQ出版社.
参考文献
- [VOD/KIT]RTKポータブル・センチ・メートル測位キット,ZEPエンジニアリング株式会社.
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門,ZEPエンジニアリング株式会社.