
|
|---|
ロボティクス入門 制御器ができるまで
1 負荷のモデリング 2 仕様の定式化 3 制御則の設計
制御の基本概念
|
|---|
|
図1 ロボット制御に確実に成功するための第1歩は,(1)モデリング(2)仕様の定式化(3)制御則の設計という基本的な流れをマスタすることだ.画像クリックで動画を見る.または記事を読む.[提供・著]南 裕樹 詳細:[VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門 |
制御とは
制御とは「注目している対象物に属する注目している状態が,ある目標状態になるように操作を加える行為」と定義されます.
セグウェイのバランス制御を考えてみましょう.注目している対象物はセグウェイ本体,注目している状態はその姿勢,目標状態は直立した姿勢です.この目標を達成するために,車輪モータを操作することで姿勢を維持します.このような「操作」と「目標状態」を明確にし,それを達成するための手段を設計することが制御の本質です.
制御系設計の流れ
1.負荷のモデリング
制御対象を数学モデルで表現するプロセスです.これは,対象物の本質的な性質を理解し,それを数式やモデルで記述する作業です.対象物の質量($m$),加速度($a$),および力($F$)の関係を示す$F=ma$は,その一例です.
2.仕様の定式化
制御系に求められる性能や制約条件を明確にします.制御対象が振動せずに目標値に収束すること(安定性)や,目標値への応答速度が一定以上であること(応答性)が求められます.このような仕様は,数値や指標で具体的に定める必要があります.
3.制御則の設計
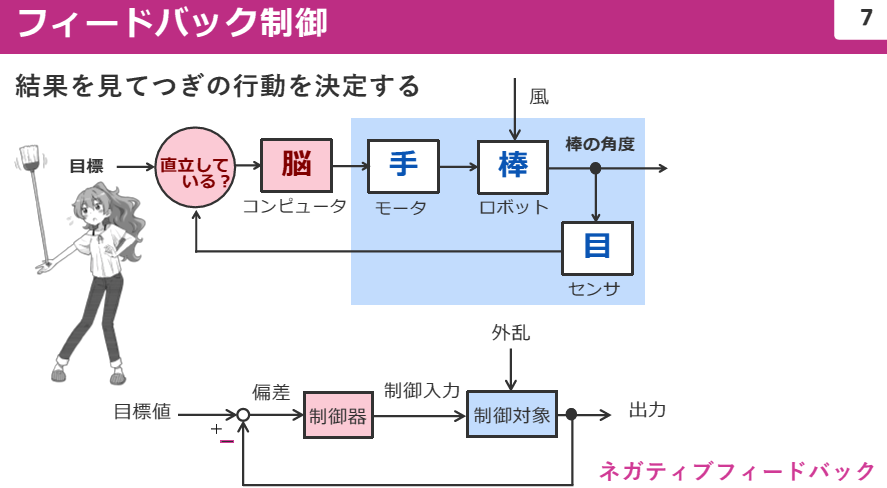
モデルと仕様を基に,制御対象を目標状態に導くためのアルゴリズム(制御則)を決定します.代表的な制御方式として,フィードバック制御があります.これは,現在の状態と目標状態の差(偏差)を計算し,その差を最小化するように制御入力を調整する方法です.
フィードバック制御の重要性
フィードバック制御は,ロボティクスにおける制御設計の中心的な役割を果たします.ネガティブ・フィードバックを用いることで,外乱や予期せぬ環境変化に対する頑健性を確保します.
棒を手で直立させる「倒立振子」の制御を考えます.制御対象は棒,目標状態は直立した姿勢です.棒の傾き角度をセンサで測定し,その値が目標値(直立)からどれだけずれているかを計算します.その偏差に基づき,モータが動き,棒を適切な方向に補正します.この一連の流れは,ロボット制御でも共通する重要な考え方です.
負荷のモデリング
モデリングとは
モデリングは,制御対象を数学的に表現する作業です.このステップでは,対象物の物理特性や環境条件を考慮し,それらを数式やモデルとして構築します.モデルの精度が制御系の性能に直接影響するため,モデリングは非常に重要です.
モータの回転運動をモデル化する場合,以下のような物理特性が考慮されます.
- 慣性モーメント($J$):回転運動の質量的な性質
- 摩擦トルク($T_f$):摩擦によるエネルギ損失
- 入力トルク($T_{in}$):モータからの駆動トルク
これらの要素を組み合わせた運動方程式がモータの基本モデルになります.このモデルを基に制御則を設計することで,モータの回転速度や位置を精密に制御できるようになります.
モデリングの応用例
モデリングは,ロボット・アームやドローンといった複雑な制御対象にも応用されます.ロボット・アームのモデリングでは,各関節の回転角度や力の伝達が考慮されます.これにより,目標地点への精確な移動や物体の正確な操作が可能になります.
モデリングの品質が制御の成否を分けるため,このプロセスには数学や物理の知識が必要です.そのため,制御エンジニアには,モデルの適切性を評価するスキルと,必要に応じてモデルを改良する能力が求められます.
モデリング,仕様の定式化,制御則の設計という流れを確実にマスタすることで,より高度な制御器を開発し,ロボットの性能を向上させることが可能です.〈著:ZEPマガジン〉
著者紹介
- 2009年3月 京都大学大学院情報学研究科博士後期課程修了.日本学術振興会特別研究員(DC2),舞鶴工業高等専門学校助教,京都大学特定助教,奈良先端科学技術大学院大学助教,大阪大学講師
- 2019年3月 大阪大学大学院工学研究科機械工学専攻准教授.ノイズシェーピング理論に基づく量子化器設計およびその応用に関する研究に従事.博士(情報学).
著書
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【ロバスト制御編】,ZEPエンジニアリング株式会社.
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】,ZEPエンジニアリング株式会社.
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【状態フィードバック制御編】,ZEPエンジニアリング株式会社.
- [VOD/Pi2W KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- Pythonによる制御工学入門(改訂2版),オーム社(2024).
- 制御系設計論,コロナ社(2021).
- やさしくわかるシーケンス制御,オーム社(2020).
- Pythonによる制御工学入門,オーム社(2019).
- 倒立振子で学ぶ 制御工学,森北出版(2017).
- Arduino×Pythonで動かしながら学ぶモータ制御入門,トランジスタ技術 2020年9月号,CQ出版社.
参考文献
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門,ZEPエンジニアリング株式会社.