
|
|---|
モータ制御器の定量設計 Pythonでモデルベース制御
Ackermann関数による極配置と帰還ゲインの設定
状態空間モデルを用いたモータ制御
|
|---|
|
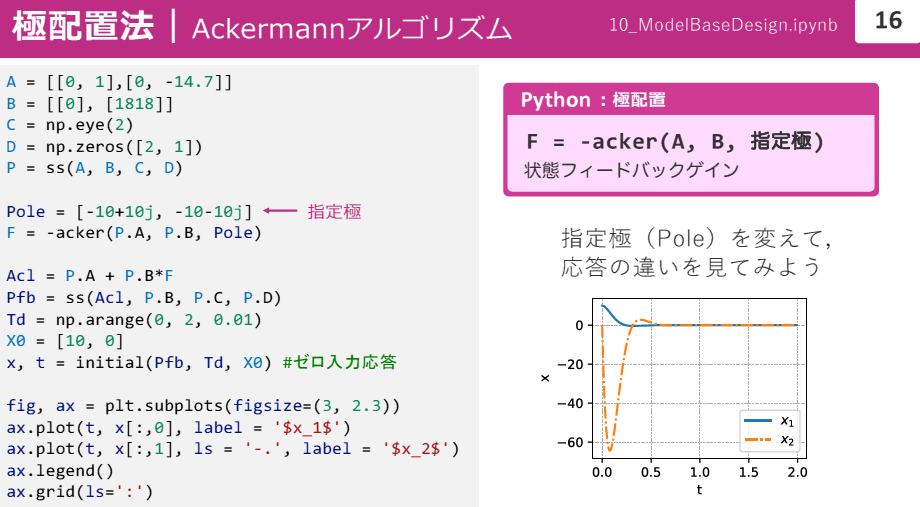
図1 モータ制御器の安定性や応答特性の両立には,Ackermann関数を利用した極配置法が有効.これは制御対象の行列$A$と入力行列$B$を用いて,特定の極を設定し,状態フィードバック・ゲイン$F$を求める方法.画像クリックで動画を見る.または記事を読む.[提供・著]南 裕樹 詳細:[VOD/Pi KIT] ラズパイ×Pythonで動かして学ぶモータ制御入門 |
モータ制御では,状態空間モデルを活用することで,システムのふるまいを数学的に記述し,制御器を設計できます.この状態空間モデルは以下のように表されます.
- 状態変数:システムの内部状態を表す変数
- 状態方程式:入力と状態の時間変化を表す方程式
- 出力方程式:状態変数と出力の関係を示す方程式
モータの回転速度と位置を状態変数とし,トルクを入力とする場合,状態方程式と出力方程式を設定することで,モータの動作をモデル化できます.
状態空間モデルの応答には以下の2つがあります.
- 零入力応答:初期状態に依存する応答
- 零状態応答:入力に依存する応答
これらの応答は,Pythonを用いたシミュレーションによって制御対象のふるまいを可視化できます.
極配置とAckermann関数
制御システムを設計する際,安定性や応答速度を調整するために,状態フィードバックを用いた極配置が重要になります.極配置とは,閉ループ・システムの固有値を適切に設定し,所望の応答を得る手法です.
極配置の代表的な手法の1つにAckermann関数を用いた方法があります.この方法では,制御対象の行列$A$と入力行列$B$を用いて,特定の極を設定し,状態フィードバック・ゲイン$F$を求めます.
Ackermann関数を用いた極配置の利点は以下のとおりです.
- 計算が容易であり,アルゴリズムが確立されている
- 指定した固有値に応じてシステムの応答を制御できる
- 任意の状態に対して安定性を保証できる
この方法により,振動的な応答を抑制し,応答速度を向上させることが可能になります.
キーワード:極配置とシステム安定性
極配置とは
極配置とは,制御対象の閉ループ系の極を意図的に配置し,システムの応答を調整する手法です.極とは,システムの特性方程式の解であり,安定性や過渡応答のふるまいを決定します.
極配置の目的は,以下の3点に集約されます.
- システムの安定性を確保する
- 応答速度を適切に設定する
- オーバーシュートや振動を制御する
極が負の実数部をもつ場合,システムは漸近安定となり,時間とともに収束します.一方,極が複素数の場合,実部の符号によって振動特性が決まります.
システムの安定性
システムの安定性を決定するためには,以下の条件を確認します.
- すべての固有値の実部が負であること
- 固有値が適切な減衰比をもつこと
- 制御入力によって適切に極を配置できること
極配置を適切に行うことで,応答速度を向上させると同時に,過度の振動やオーバーシュートを抑制することが可能になります.〈著:ZEPマガジン〉
著者紹介
- 2009年3月 京都大学大学院情報学研究科博士後期課程修了.日本学術振興会特別研究員(DC2),舞鶴工業高等専門学校助教,京都大学特定助教,奈良先端科学技術大学院大学助教,大阪大学講師
- 2019年3月 大阪大学大学院工学研究科機械工学専攻准教授.ノイズシェーピング理論に基づく量子化器設計およびその応用に関する研究に従事.博士(情報学).
著書
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【ロバスト制御編】,ZEPエンジニアリング株式会社.
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】,ZEPエンジニアリング株式会社.
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【状態フィードバック制御編】,ZEPエンジニアリング株式会社.
- [VOD/Pi2W KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- Pythonによる制御工学入門(改訂2版),オーム社(2024).
- 制御系設計論,コロナ社(2021).
- やさしくわかるシーケンス制御,オーム社(2020).
- Pythonによる制御工学入門,オーム社(2019).
- 倒立振子で学ぶ 制御工学,森北出版(2017).
- Arduino×Pythonで動かしながら学ぶモータ制御入門,トランジスタ技術 2020年9月号,CQ出版社.
参考文献
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門,ZEPエンジニアリング株式会社.