
|
|---|
スピードマスタ・シリーズ
プロの技術を1日で!実習キット付きVOD
[VOD/Pi4 KIT]Pythonで一緒に!ロボット制御のモデルベース設計【実習編】
PIDも状態フィードバックも!キットで学ぶ現代的モータ制御プログラミング
- 型名:z-modelhands-on4
- 仕様:実習キット,開発・実習用ソース,講義339分,解説251頁
- 定価:38,500円(税込・送料無料)
- 著者・講師: 南 裕樹/Yuki Minami
- 企画制作・主催: ZEPエンジニアリング株式会社
- 1人当たり1ライセンスです ※本VOD教材の講義内容は,『[VOD/Pi2W KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門』と同じですが, 実習キット構成とソースコードをアップデートした製品です
- 関連製品:[VOD/Pi4 KIT/Book]Pythonで一緒に!ロボット制御のモデルベース設計【実習編】
- 関連製品:[VOD]Pythonで一緒に!ロボット制御のモデルベース設計【状態フィードバック制御編】
- 関連製品:[VOD]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】
- 関連製品:[VOD]Pythonで一緒に!ロボット制御のモデルベース設計【ロバスト制御編】
- 関連製品:[VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門
- 関連製品:[VOD/KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門
- 関連製品:[VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門
- 関連製品:[VOD/KIT]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門
|
|
|
|---|
学ぶこと
AI技術の進化にともない,身のまわりのモノの知能化が加速しています.モノの知能化では,「賢く動かす」ということが要求されます.この「モノを賢く動かす」方法を体系的にまとめたものが,制御工学です.制御工学を学ぶことで,モノの動きをデザインできるようになります.また,実際にモノを動かすためには,アクチュエータやセンサのしくみだけでなく,コンピュータとの接続方法も理解する必要があります.
本VOD製品では,モータ制御を題材として制御工学の考え方や使い方を学びます.さらに,組み込み制御やネットワーク制御でよく用いられるコンピュータ「RaspberryPi」を動かしながら,Pythonによるモータ制御系の設計方法や実装方法を体験することができます.
Pythonを活用した制御工学をさらに深く学びたい方は,書籍「 Pythonによる制御工学入門(改訂2版)」が付属した下記のVOD製品がおすすめです.
[VOD/Pi4 KIT/Book]Pythonで一緒に!ロボット制御のモデルベース設計【実習編】
特徴1. 工具はいっさい不要!すぐに実験を始められる実習キット
|
|
|---|
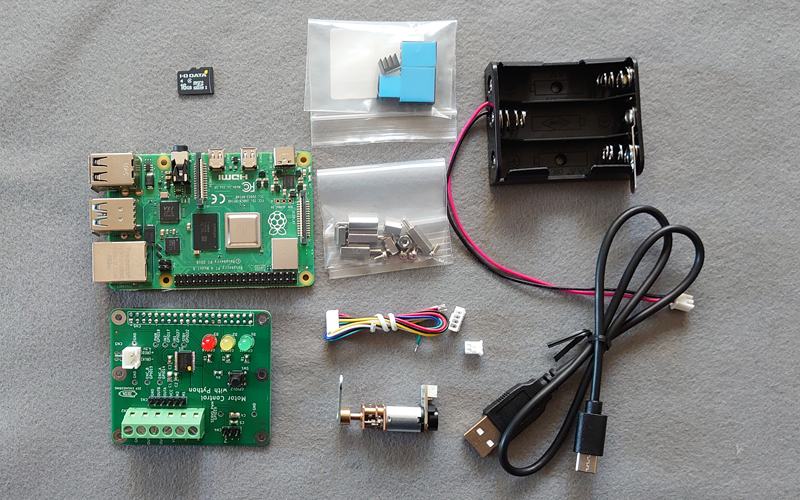
(1)Raspberry Pi 4 Model B 2GB
(2)電源アダプタ&USBハブ
(3)モータ制御実験セット
- モータ・ドライバ基板完成品(動作確認済)
- DCモータ(IT0481)
- クランクアーム
- 電池ボックス
- 実習環境書き込み済みマイクロSDカード
特徴2.充実のテキスト(全251頁)&講義動画(339分)
【第1部】Pythonとメカトロニクスの基礎
- RaspberryPiの説明
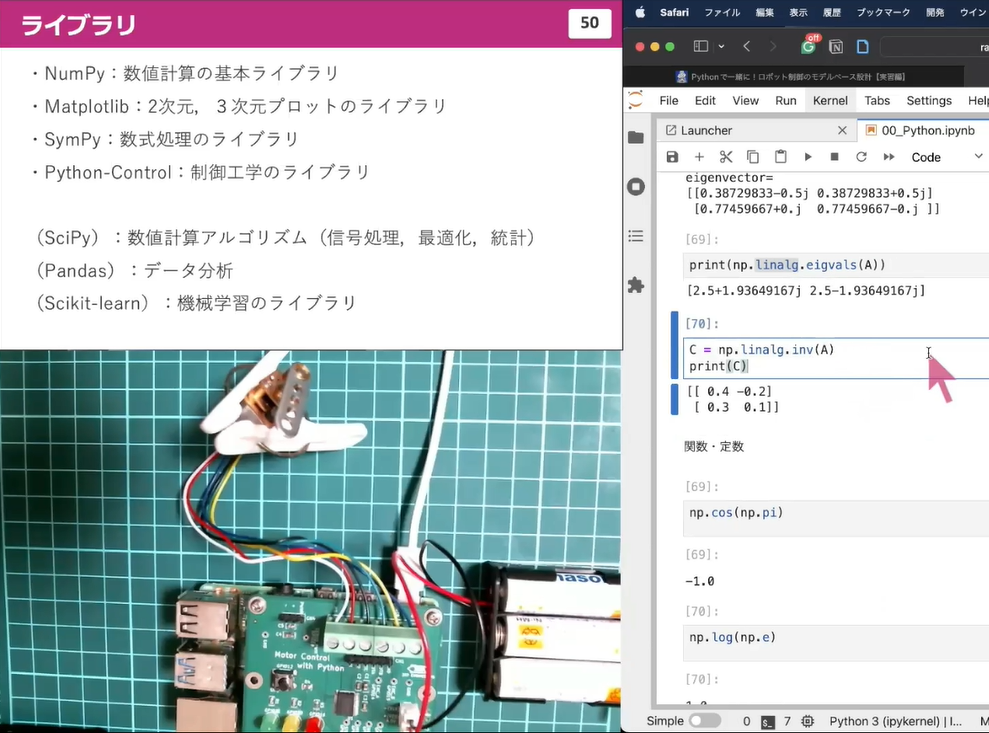
- JupyterLabの起動
- Pythonコードの記述方法
- LED点滅回路(電気回路の復習)
- DCモータ(モータ・ドライバ,PWM)
- ロータリ・エンコーダ(逓倍原理,カウンタ回路)
【第2部】制御工学超入門
- 制御工学とは
- モータのON/OFF制御
- モータのP制御
- モータのPID制御(擬似微分やディジタル実装の説明)
- PIDゲインのチューニング
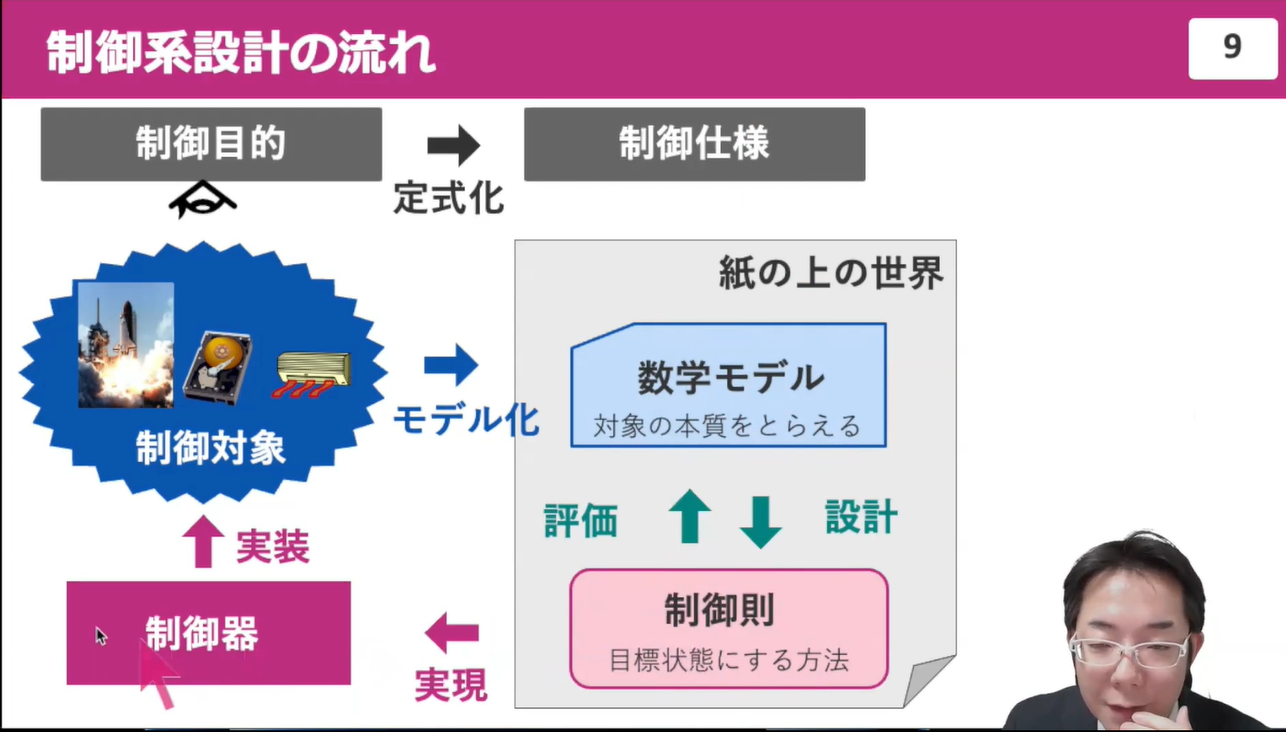
【第3部】モデルベース設計
- モデル・マッチング法(モデリングを含む)
- 状態方程式に基づく制御系設計
- 状態フィードバック制御
- サーボ系
- オブザーバ
- 定常カルマン・フィルタ
- (付録)ループ整形法
特徴3.確実に動く!講師のお手本ソースコード10本超
自分の手でソースコードを入力することはとても重要ですが,慣れるまでは,なかなか思うように動いてくれないものです.LEDの点灯制御,モータのON/OFFやPID制御,モデルベース設計まで,講師が作成したソースコードを10点以上提供いたします.
ショートセミナ
回転角度を検出するセンサ「エンコーダ」のしくみとその出力値の確認
受講対象
- RaspberryPiでモノを動かしてみたい方
- 制御工学の基礎を学びたい方
- Pythonで制御工学を体験したい方
あると望ましい予備知識
- プログラミングの基礎(数行のコードを書いて実行したことがある)
- 電気回路の基礎(オームの法則を知っている)
講演の目標
- 簡単なPythonプログラムを作成できる
- Raspberry Piで外部機器を制御する方法を説明できる
- 計測と制御の基礎を説明できる
- 制御系設計(動きのデザイン)の基本的な方法を説明できる
実習に必要な環境や周辺機材
- パソコン
- Wi-Fi環境
- 単三電池3本(eneloopなどの充電池でも構いません)
本オンデマンド製品を購入された方へ ~視聴リンクとパスワード~
下記リンク先(青字)をクリックして,本製品購入後にメールにてお知らせしたパスワードを入力してください.
339分講義ビデオ(著作権保護のためパスワードがかけられています)
『Pythonで一緒に!ロボット制御のモデルベース設計 【実習編】』講義ビデオ.mp4
- 0:00:10 自己紹介とセミナの概要
- 0:21:33 実習キットの準備
- 0:43:49 Pythonとメカトロニクスの基礎
- 2:45:02 制御工学の基礎とモータのPID制御
- 4:27:20 モデルベース設計
講義テキスト(全251頁)と事前準備資料(著作権保護のためパスワードがかけられています)
※実習を行う際は,事前確認_raspberrypi3A編.pdfを参照して,JupyterLabの起動確認をお願いします.スタンドアロンでは動作が不安定となる可能性があるため,本pdf p.6の選択肢2のWi-Fi接続でセットアップしてください.
スタンドアロンで実習キットを動作させる場合は,Raspberry Pi3 Model B/B+やRaspberry Pi4がおすすめです.
ソースコード(著作権保護のためパスワードがかけられています)
講師紹介
略歴
2009年3月京都大学大学院情報学研究科博士後期課程修了.日本学術振興会特別研究員(DC2),舞鶴工業高等専門学校助教,京都大学特定助教,奈良先端科学技術大学院大学助教,大阪大学講師などを経て,2019年3月より大阪大学大学院工学研究科機械工学専攻准教授. ノイズシェーピング理論に基づく量子化器設計およびその応用に関する研究に従事.博士(情報学).
主な著書
- Pythonによる制御工学入門(改訂2版),オーム社(2024)
- 制御系設計論,コロナ社 (2021)
- やさしくわかるシーケンス制御,オーム社(2020)
- Pythonによる制御工学入門,オーム社 (2019)
- 倒立振子で学ぶ 制御工学,森北出版 (2017)
- Arduino×Pythonで動かしながら学ぶモータ制御入門,トランジスタ技術2020年9月号
関連製品
- [VOD/Pi4 KIT/Book]Pythonで一緒に!ロボット制御のモデルベース設計【実習編】
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【状態フィードバック制御編】
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】
- [VOD]Pythonで一緒に!ロボット制御のモデルベース設計【ロバスト制御編】
- [VOD]Pythonで一緒
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門【mz-matrobo-on1】
- [VOD/KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門【mz-matrobo-on2】
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門【mz-rosrobo-on3】
- [VOD/KIT]確率・統計処理&真値推定!自動運転時代のカルマン・フィルタ入門【z-kalman-mv2】
パーツキットと講義動画でプロの技術を1日習得
スピードマスタ・シリーズ
電子回路・基板設計からプログラミングまで,エンジニアがマスタすべき技術は多岐にわたり,開発期間も短くなっています.多くの書物を読み漁ったり,玉石混交のネット情報に振り回されたりしている暇はありません.
本シリーズには,各分野の一線で活躍する技術者が厳選したパーツセット,設計の要点を効率よく解説するセミナ動画,講義テキスト,お手本ソースコードなどが同梱されています.百戦錬磨の技を一見することで,未経験の技術が驚くほど短時間で身につくだけでなく,信頼性の高いシステム開発に必要なプロの眼が養われます.