
|
|---|
RTKレシーバ用アンテナ
スタック型パッチとヘリカル
空力と高精度測位の両立を目指したアンテナ選定
|
|---|
|
図1 GNSS測位の品質を決定づける基準値「搬送波対雑音比」が40dBHz以上になるように,アンテナや受信環境を整備することで,安定したRTK測位の実現が期待できる.画像クリックで動画を見る.または記事を読む.[提供・著]樋田 啓 詳細:自動運転&SLAMロボット開発 要点100【セッション5】cm測位「キネマティックGNSS」の始め方 |
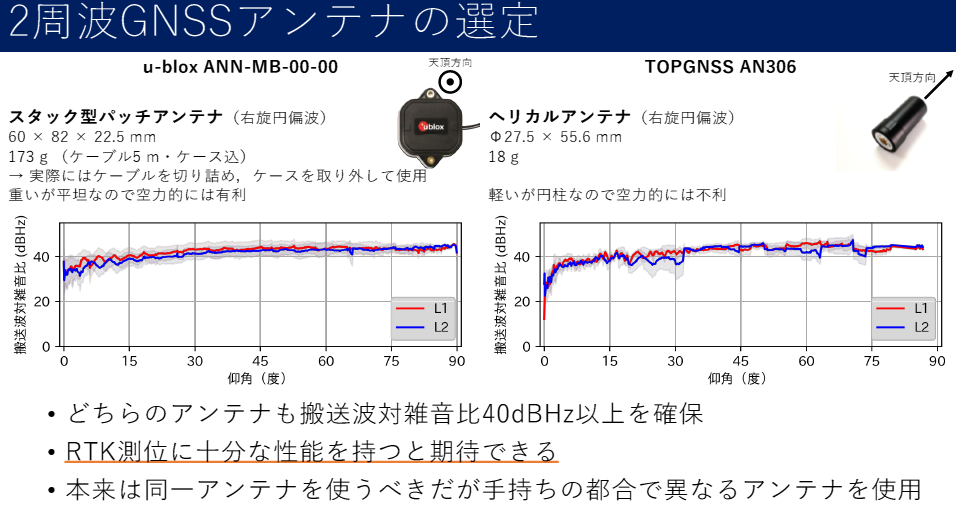
人力飛行機のような極限まで軽量化を求められる環境では,搭載機器のサイズと重量が致命的に影響します.GNSS測位用のアンテナも例外ではなく,大きくて重いアンテナは使えません.このため,小型軽量でありながらRTK測位に必要な性能を満たすアンテナの選定が重要です.
今回評価対象となったアンテナは2種類です.1つ目はu-blox製のスタック型パッチ・アンテナ「ANN-MB-00-00」です.このアンテナは60×82×22.5 mmと比較的大型で,ケーブル込みで173 gあります.しかし平坦な形状であるため,空力的には安定しやすい特性をもっています.使用時にはケーブルを切断し,ケースを除去することで軽量化が図られています.
ヘリカル・アンテナの軽量性とその特性
2つ目はTOPGNSS製のAN306ヘリカル・アンテナです.このアンテナは直径27.5 mm,高さ55.6 mmであり,重量はわずか18 gと非常に軽量です.一方で形状が円筒状であることから,空力的にはパッチ型に比べて不利です.ただし,内部構造がヘリカル構造であるため,受信方向に対する感度が高く,天頂方向の受信性能に優れるという特性があります.
両アンテナともに右旋円偏波(RHCP)に対応しており,GNSS衛星の偏波特性に適合しています.また,RTK測位の可否を判断するうえで基準とされる搬送波対雑音比($C/N_O$)において,いずれも40 dBHz以上を記録しており,十分な測位精度が得られることが確認されています.
評価の前提と測位への影響
本来は同一のアンテナを用いることで差分誤差を最小化するべきですが,手もち機材の都合により異なるアンテナが使用されています.この点は測定誤差の一因になる可能性がありますが,$C/N_O$の水準が高いことから,RTK測位の成立条件は満たされていると考えられます.
GNSSアンテナの選定において重要となる要素は以下のとおりです.
- サイズと重量:搭載対象の機体構造との相性を考慮する
- 偏波特性:右旋円偏波対応であるかを確認する
- 搬送波対雑音比($C/N_O$):40 dBHz以上が望ましい
- 空力形状:形状が飛行性能に与える影響を考慮する
このように,RTK用アンテナの選定では単純な受信性能だけでなく,物理的特性と空力的な条件の両立が求められます.
GNSS測位における信号品質の指標
搬送波対雑音比($C/N_O$)はGNSS受信における信号品質を定量的に示す指標です.単位はdBHzであり,搬送波のパワーと受信器で扱うノイズ密度との比率を対数スケールで表します.一般にこの数値が高いほど,GNSS信号の品質が良好であることを意味し,高精度な測位に直結します.
RTK測位では衛星間の位相差をもとに誤差を補正するため,受信信号の品質が非常に重要です.特に搬送波位相の測定精度が求められるため,$C/N_O$が一定以上であることが条件になります.多くの場合,$C/N_O$が40 dBHz以上であれば高精度測位が可能とされます.
$C/N_O$の測定と運用上の注意点
$C/N_O$はGNSSレシーバから得られる観測データに含まれており,たとえばu-blox製レシーバではRXM-RAWXメッセージ内に記録されています.この値をリアルタイムに監視することで,アンテナ配置の最適化や外来ノイズの影響評価が可能になります.
$C/N_O$の値は次のような要因により変動します.
- 衛星の仰角:高仰角の衛星ほど信号品質が高い
- アンテナの指向性:天頂方向の感度が高い構造が有利
- 遮蔽物の有無:建物や樹木による遮蔽で$C/N_O$は低下する
- 干渉源の存在:ほかのRF機器によるノイズが影響する
$C/N_O$は測位可能性を単に保証する数値ではなく,環境やアンテナ構造との関係を定量的に評価できる重要なパラメータです.測位システムの構築やアンテナの評価においては,この値を基準にすることで安定した高精度測位が実現しやすくなります.
搬送波対雑音比($C/N_O$)はGNSS測位の品質を決定づける基準値です.40 dBHz以上を目安にアンテナや受信環境を整備することで,安定したRTK測位の実現が期待できます.信号品質の定量評価に欠かせないパラメータです.
〈著:ZEPマガジン〉
著者紹介
- 2013年 東京大学大学院 総合文化研究科 広域科学専攻 相関基礎科学系 博士課程修了
- 学生時代から現在まで,人力飛行機の電子装備の設計・製作・運用を行う
著書
- PSoCを使用したプロトン磁力計,トランジスタ技術2009年1月号,CQ出版社.
- 舞いあがれ人力飛行機(連載) Interface 2023年2月号~2024年5月号,CQ出版社.
参考文献
- [VOD/KIT] RTKポータブル・センチメートル測位キット,ZEPエンジニアリング株式会社.
- LiDAR×RTK×IMUフュージョン!自動運転&SLAMロボット開発 要点100,ZEPエンジニアリング株式会社.
- [VOD/KIT]SLAMロボット付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- "[VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.