
|
|---|
GNSSレシーバのデータ処理ソフト RTKLIBの活用
ublox-RINEX変換から可視化まで
GNSS観測データの後処理とRTKLIBの役割
|
|---|
|
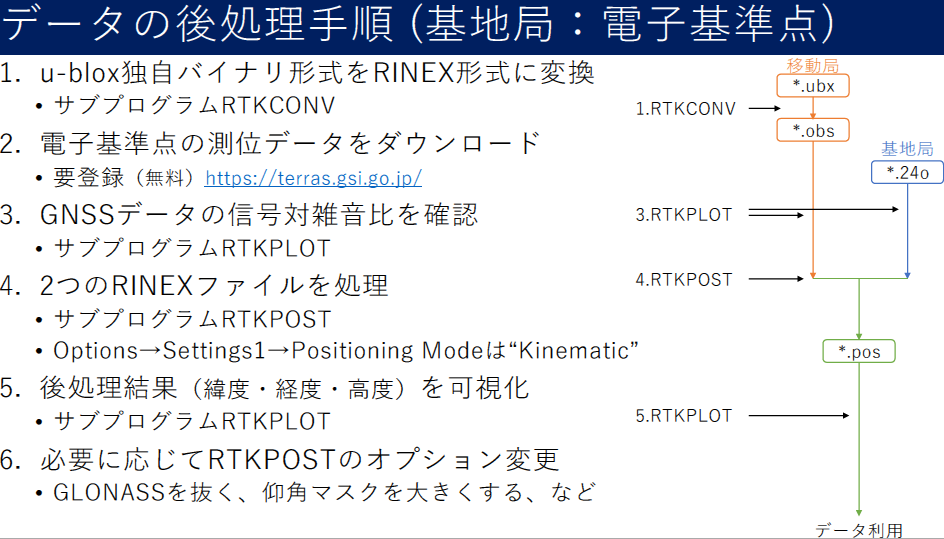
図1 RTKLIBは,u-bloxなどの受信機が出力する独自バイナリ形式(*.ubx)を標準的なRINEX形式に変換する機能など,さまざまな受信データ処理用のライブラリ.画像クリックで動画を見る.または記事を読む.[提供・著]樋田 啓 詳細:自動運転&SLAMロボット開発 要点100【セッション5】cm測位「キネマティックGNSS」の始め方 |
GNSSレシーバで収集したデータを高精度な測位情報に変換するためには,観測後のデータ処理が欠かせません.この処理にはRTKLIBというオープンソース・ソフトウェアを利用します.RTKLIBは,u-bloxなどの受信機が出力する独自バイナリ形式(*.ubx)を標準的なRINEX形式に変換する機能をもっています.RINEX形式に変換することで,特定の受信機に依存しない後処理が可能になります.
後処理の具体的な手順
後処理には以下のステップがあります.
- u-blox独自バイナリ形式をRINEX形式に変換する
- 電子基準点のRINEXデータを国土地理院からダウンロードする
- 観測信号の信号対雑音比(SNR)を可視化して確認する
- 移動局と基準局のRINEXファイルをRTKPOSTで処理する
- 処理結果($緯度・経度・高度$)をRTKPLOTで可視化する
- 必要に応じてRTKPOSTのオプションを調整する
処理の精度を高めるために,「Positioning Mode」を``Kinematic''に設定します.また,仰角マスクを30度に設定することで,低高度の衛星信号を除外して安定性を向上させます.GNSSの組み合わせにはGPSとQZSSを使用します.
測位精度と初期化時間
この手法による後処理では,水平精度が2 cm,高度方向で6 cm程度の精度が得られます.初期化時間は$17$秒で,比較的短時間でfix解に到達します.fix解とは,整数アンビギュイティが正しく決定された状態を意味し,float解に比べて信頼性が高いです.処理結果の確認にはRTKPLOTを使用して,結果を時系列で可視化できます.
GLONASSの信号を除外したり,基線長に応じた仰角マスク設定を見直すなど,オプションの調整によってfix率の向上が期待できます.実測においては,基準局からの距離が2 km程度で99$\%$のfix率を記録しています.
RTKLIBの概要
RTKLIBは,GNSS測位における後処理およびリアルタイム処理を可能にするソフトウェア・ライブラリです.オープンソースで提供されており,多くの研究機関や個人ユーザに利用されています.対応するフォーマットや測位方式の柔軟性が高く,RINEX形式やu-bloxのバイナリ形式など,さまざまな入力に対応しています.
RTKLIBの主な構成要素
RTKLIBは複数のサブプログラムから構成されており,用途に応じて以下のように使いわけます.
- RTKCONV:バイナリ・データをRINEX形式に変換する
- RTKPOST:RINEXファイルを用いて後処理を実施する
- RTKPLOT:測位結果や信号状態を可視化する
特にRTKPOSTでは,キネマティック・モードやスタティック・モードなどの設定が可能で,移動局に対する解析や定点観測の処理が選択できます.設定項目には,仰角マスクや使用する衛星系(GPS,QZSS,GLONASSなど)も含まれ,精度向上のために細かく調整が可能です.
RTKLIBの応用と制限
RTKLIBは多用途に使える一方で,操作や設定にはある程度の知識が必要です.オプション設定の理解が不十分だと,正しいfix解を得られないこともあります.また,基準局と移動局の観測時間の一致や,信号状態の確認など,前処理も結果に大きく影響します.信号のSNRを確認し,不良データを除去することも重要です.
RTKLIBの活用においては,データの取得から可視化までの流れを一貫して管理することが鍵です.RTKCONVによる変換,RTKPOSTでの処理,RTKPLOTでの確認という一連の流れを理解し,柔軟に運用することで高精度な測位が実現できます.
〈著:ZEPマガジン〉
著者紹介
- 2013年 東京大学大学院 総合文化研究科 広域科学専攻 相関基礎科学系 博士課程修了
- 学生時代から現在まで,人力飛行機の電子装備の設計・製作・運用を行う
著書
- PSoCを使用したプロトン磁力計,トランジスタ技術2009年1月号,CQ出版社.
- 舞いあがれ人力飛行機(連載) Interface 2023年2月号~2024年5月号,CQ出版社.
参考文献
- [VOD/KIT] RTKポータブル・センチメートル測位キット,ZEPエンジニアリング株式会社.
- LiDAR×RTK×IMUフュージョン!自動運転&SLAMロボット開発 要点100,ZEPエンジニアリング株式会社.
- [VOD/KIT]SLAMロボット付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- "[VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.