
|
|---|
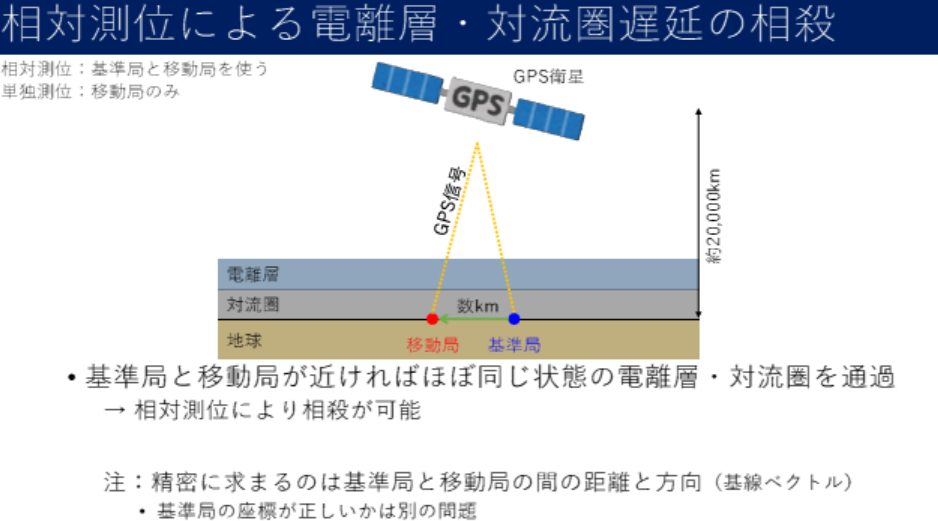
電離層・対流圏遅延の相殺
cm級の精密測位を支える相対測位
cmGNSS測位のしくみ
|
|---|
|
図1 単独測位では移動局だけを用い,GPS衛星からの信号をもとに位置を推定するが,大きな誤差が含まれている.代表的な誤差要因は,電離層や対流圏による遅延,受信機のクロック誤差など.画像クリックで動画を見る.または記事を読む.[提供・著]樋田 啓 詳細:自動運転&SLAMロボット開発 要点100【セッション5】cm測位「キネマティックGNSS」の始め方 |
GNSS測位でcm級の精度を実現するには,単独測位だけでは十分ではありません.単独測位では移動局だけを用い,GPS衛星からの信号をもとに位置を推定しますが,ここには大きな誤差が含まれています.代表的な誤差要因は,電離層や対流圏による遅延,受信機のクロック誤差などです.
そこで,高精度な測位を行うために「相対測位」という方法が利用されます.相対測位では,既知の位置に設置された基準局と,位置を測定したい移動局の2点を使います.この2局間の衛星信号の差分をとることで,共通の誤差成分を打ち消すことができます.
遅延の正体:電離層と対流圏
GNSS衛星からの信号は,地上の受信機に届くまでに地球の大気を通過します.このとき,主に電離層と対流圏で信号が遅延します.電離層では電子密度の影響により,周波数に依存した屈折が発生し,電波の伝播速度が低下します.対流圏では気温,気圧,水蒸気量により信号が遅延します.
この遅延量は空間的に変化しますが,基準局と移動局が十分に近ければ,両者が通過する電離層や対流圏の状態はほぼ同じであるとみなすことができます.したがって,これらの誤差は差分処理によって相殺可能です.
求まるのは「基線ベクトル」
相対測位で得られるのは,基準局と移動局の間の距離と方向,すなわち「基線ベクトル」です.このベクトルの大きさと向きを高精度で求めることが,cm級の測位に不可欠です.ただし,基準局そのものの位置が正しいかどうかは別問題であり,これが正しくない場合,最終的な位置にずれが生じます.
GNSS測位においては,測距値として「擬似距離」が用いられます.これは信号の到達時間から計算される値で,$シフト×光速$で求まります.しかし,電離層や対流圏によって信号速度が遅くなるため,これが真の距離ではありません.相対測位は,このような環境による誤差の影響を抑える技術として非常に重要です.
相対測位とは何か
相対測位とは,GNSS衛星からの電波を2つの受信機で同時に受信し,それらの測定結果の差分を用いて位置を求める測位方法です.2つの受信機のうち,位置が既知で固定された受信機を「基準局」,位置を求めたい受信機を「移動局」と呼びます.
この方法の特徴は,共通の誤差成分を差分によって打ち消すことにあります.基準局と移動局がほぼ同じ電離層や対流圏を通過する場合,電波の遅延はほぼ同じになります.よって,この共通成分を差し引くことで,残るのは2点間の差だけです.
相対測位の利点と条件
相対測位の最大の利点は,高精度で測位できることです.数cmの誤差で位置を特定することができ,農業,測量,自動運転,建設など多くの分野で利用されています.
この高精度を実現するためには,以下の条件を満たすことが重要です.
- 基準局と移動局が数km以内にあること
- 両局が同時に同じ衛星から信号を受信できること
- 基準局の位置が既知であること
このような条件が整うことで,電離層・対流圏による遅延,衛星軌道の誤差,クロックの誤差などを大きく低減できます.
基準局と移動局の関係
相対測位では,正確に求まるのは「基線ベクトル」です.これは基準局と移動局の間の距離と方向を表すものであり,たとえば移動局が北東方向に何m離れているかを高精度に特定できます.
ただし,基準局の位置が正確でなければ,移動局の絶対位置も正確にはなりません.したがって,正確な絶対位置を得るためには,基準局の位置そのものも精密に測量されている必要があります.
〈著:ZEPマガジン〉
著者紹介
- 2013年 東京大学大学院 総合文化研究科 広域科学専攻 相関基礎科学系 博士課程修了
- 学生時代から現在まで,人力飛行機の電子装備の設計・製作・運用を行う
著書
- PSoCを使用したプロトン磁力計,トランジスタ技術2009年1月号,CQ出版社.
- 舞いあがれ人力飛行機(連載) Interface 2023年2月号~2024年5月号,CQ出版社.
参考文献
- [VOD/KIT] RTKポータブル・センチメートル測位キット,ZEPエンジニアリング株式会社.
- LiDAR×RTK×IMUフュージョン!自動運転&SLAMロボット開発 要点100,ZEPエンジニアリング株式会社.
- [VOD/KIT]SLAMロボット付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- "[VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.