
|
|---|
GNSSコンパスの飛行機への実装
移動基地局方式による飛行機搭載GNSSコンパス
2台のアンテナとレシーバを搭載
|
|---|
|
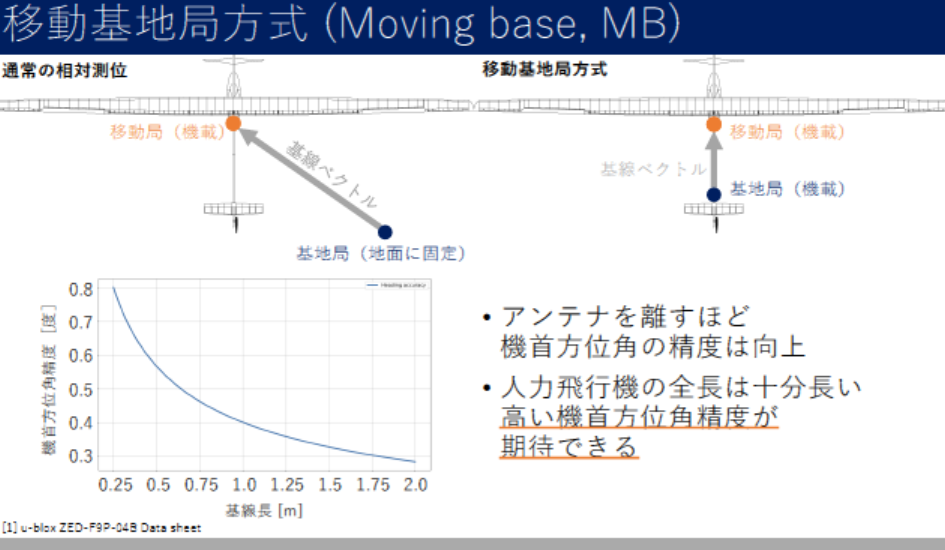
図1 GNSSコンパスを飛行機に実装することで,2台のアンテナ間の基線ベクトルを基に高精度な姿勢推定が可能.移動基地局方式を採用すれば,機体上だけで完結した測位ができ,飛行中のリアルタイムな姿勢情報が得られる.画像クリックで動画を見る.または記事を読む.[提供・著]樋田 啓 詳細:自動運転&SLAMロボット開発 要点100【セッション5】cm測位「キネマティックGNSS」の始め方 |
GNSSコンパスは,2台のGNSSアンテナとレシーバを組み合わせることで機体の姿勢情報を得る技術です.このシステムでは,GNSS信号を利用した相対測位により,アンテナ間の基線ベクトルを高精度で計算します.このベクトルを基に座標変換を行うことで,機体の機首方位角やピッチ角を推定できます.
通常のGNSS相対測位では,基地局を地上に固定して移動局との相対位置を計測します.これに対して,移動基地局方式では,2台のGNSSレシーバを両方とも機体上に搭載します.これにより,飛行機内部での高精度な相対測位が可能になり,飛行中の姿勢を即座に把握できます.
基線長と精度の関係
アンテナ間の距離,すなわち基線長は姿勢推定精度に直結します.たとえばu-blox社のZED-F9Pレシーバの仕様によると,2mの基線長を確保すれば,機首方位角精度はおおよそ0.3°未満に抑えられます.これは非常に高い精度であり,安定した飛行制御や記録が可能になります.
人力飛行機などの全長が長い機体では,物理的にアンテナを十分に離すことができます.このため,機体構造に制約されることなく,必要な基線長を確保できます.長い基線長は,微小な姿勢変化も検出可能とするため,高精度姿勢推定には重要です.
測定構成と補助機材
初期の実装例では,1台の1周波GNSSと1台の2周波GNSSレシーバを組み合わせ,記録されたログを後処理で比較する方法が採用されました.これにより簡易的に姿勢推定が実現されました.また,ピッチ角の確認には超音波距離計が併用されました.これは2点間の距離変化からピッチ角を推定できる特性があるためです.
このような構成により,専用のIMUを搭載せずとも,飛行中の機体姿勢を安価に推定することが可能です.後処理を含めた検証により,GNSSコンパスの有効性が確認されています.
移動基地局方式の基本と特徴
移動基地局方式(Moving Base方式)とは,GNSS相対測位において,2台のレシーバをともに移動体に搭載する技術です.従来の相対測位では,基地局は地上に固定され,移動局との間で位置関係を求めます.これに対して移動基地局方式では,両方のレシーバを同一機体に取り付け,相対的な姿勢を測定します.
この方式では,2台のGNSSアンテナから得られる測位情報を用いて基線ベクトルを計算します.基線ベクトルとは,アンテナ間を結ぶベクトルのことで,これが高精度でわかれば,機体の方位や傾きなどの情報が取得できます.特に航空機や無人機など,長い機体をもつ移動体には適しています.
メリットと技術的条件
移動基地局方式の最大のメリットは,地上との通信を必要とせず,機体内だけで姿勢情報が得られることです.また,以下の条件を満たすことでより高い精度が得られます.
- アンテナ間の基線長を長く取る
- 2周波対応のGNSSレシーバを使用する
- ノイズの少ない環境で受信する
基線長が長いほど,方位角やピッチ角の精度は向上します.たとえば2mの基線であれば,0.3°以下の精度を得ることができます.このように,物理配置とレシーバ性能が精度を左右する重要な要素です.
応用と注意点
移動基地局方式は,IMUと併用することでさらに精度を高めることも可能です.ただし,GNSS信号の遮蔽やマルチパスの影響には注意が必要です.都市部や障害物の多い環境では,測位精度が低下する可能性があります.また,GNSSレシーバ間の同期性も,正確な基線計算には不可欠です.
この方式は,高精度な姿勢推定を必要とするさまざまな分野に応用が期待されます.たとえば空撮用ドローン,観測気球,または精密な飛行制御が求められる研究機体などに適しています.
まとめ
移動基地局方式は,2台のGNSSレシーバを用いた高精度姿勢推定技術です.基地局を移動体に搭載する構成により,リアルタイムかつ自己完結的な姿勢情報取得が可能になります.基線ベクトルの高精度推定が鍵となるため,適切な機器構成と環境設定が重要です.
〈著:ZEPマガジン〉
著者紹介
- 2013年 東京大学大学院 総合文化研究科 広域科学専攻 相関基礎科学系 博士課程修了
- 学生時代から現在まで,人力飛行機の電子装備の設計・製作・運用を行う
著書
- PSoCを使用したプロトン磁力計,トランジスタ技術2009年1月号,CQ出版社.
- 舞いあがれ人力飛行機(連載) Interface 2023年2月号~2024年5月号,CQ出版社.
参考文献
- [VOD/KIT] RTKポータブル・センチメートル測位キット,ZEPエンジニアリング株式会社.
- LiDAR×RTK×IMUフュージョン!自動運転&SLAMロボット開発 要点100,ZEPエンジニアリング株式会社.
- [VOD/KIT]SLAMロボット付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- "[VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.