
|
|---|
高精度GNSSコンパス 飛行機への実装
リアルタイム処理 vs 後処理
GNSSコンパスのリアルタイム処理とは
|
|---|
|
図1 リアルタイム処理によるGNSSコンパスの運用では,安定した通信と高いFIX率により,後処理に比べて連続性の高い測位結果が得られることが確認できた
.画像クリックで動画を見る.または記事を読む.[提供・著]樋田 啓 詳細:自動運転&SLAMロボット開発 要点100【セッション5】cm測位「キネマティックGNSS」の始め方 |
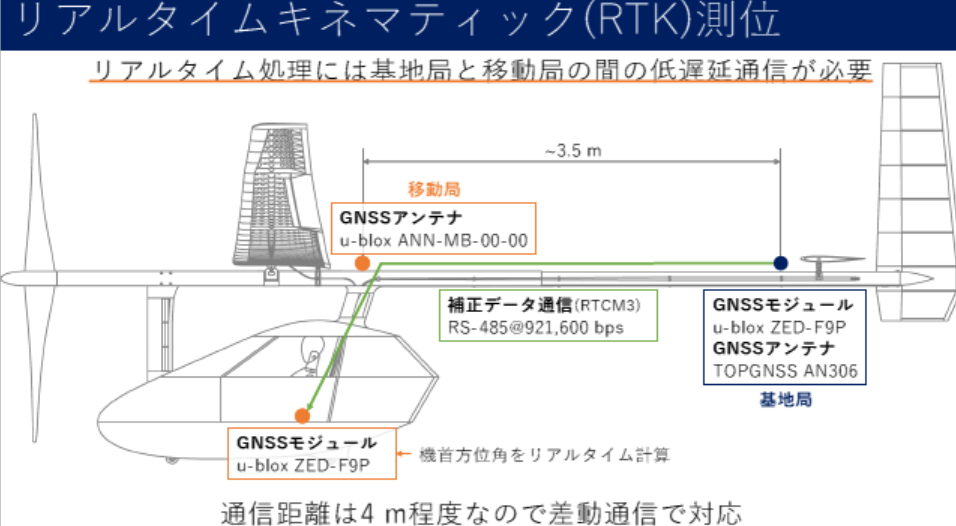
高精度GNSSコンパスを飛行機に実装する際,リアルタイムに機首方位角を取得するためには,移動局と基地局の間で低遅延かつ安定した通信が不可欠です.今回の実験では,機体の後方に設置した基地局から,前方の移動局へRS-485通信(921600 bps)で情報を送信し,移動局側で機首方位角のリアルタイム計算を行いました.
使用したハードウェアには,u-blox ZED-F9P GNSSモジュールとTOPGNSS AN306アンテナを用い,通信距離が約4 mと短いため,有線の差動通信方式が適していました.このような構成により,機体内部での安定したリアルタイム測位が可能になります.
後処理との比較と実験結果
リアルタイム処理の結果と,RTKLIB 2.4.3による後処理結果を比較すると,両者の推定値は非常によく一致しました.精度そのものに大きな違いは確認されませんでしたが,後処理ではFIX解が得られない時間帯があり,連続性の点で課題が残りました.
原因としては,RTKLIBのパラメータ設定が最適化されていなかった可能性があります.同じ観測データを使用しても,u-blox ZED-F9P内蔵アルゴリズムのほうが高いFIX率を示しました.これにより,リアルタイム処理が連続測位という点で有利であるといえます.
リアルタイム処理の技術的メリット
- 通信距離が短いため,有線接続が可能で信頼性が高い
- u-blox内蔵アルゴリズムにより,高いFIX率が期待できる
- 移動中の飛行機でも即時に機首方位角が得られる
まとめ
リアルタイム処理によるGNSSコンパスの運用では,安定した通信と高いFIX率により,後処理に比べて連続性の高い測位結果が得られることが確認できました.後処理にはパラメータ調整による精度向上の余地がありますが,リアルタイム処理では即時性と実用性が技術的な利点として際立ちます.
RTK測位の原理と構成
リアルタイム・キネマティック(RTK)測位とは,基準局からの補正情報を使って,移動局の測位精度をcmレベルにまで向上させる手法です.GNSS単独測位では数mの誤差がありますが,RTKを用いることで誤差を大幅に減らすことができます.
今回の構成では,移動局と基地局の両方にu-blox ZED-F9Pを搭載し,基地局からのRTCM3形式の補正データを,RS-485通信によって送信しています.通信距離は4 m程度であり,リアルタイム処理のための遅延も最小限に抑えられています.
FIX解とその安定性
RTK測位において「FIX解」とは,整数アンビギュイティが正しく推定され,精度が最大限に高まった解を意味します.FIX解が得られるかどうかは,アルゴリズムの精度と通信の安定性に強く依存します.
今回の比較では,同一のデータを使用してもRTKLIBによる後処理ではFIX解が途切れるケースが見られた一方,u-blox ZED-F9Pの内蔵アルゴリズムではより高いFIX率が確認されました.これは,リアルタイム処理に特化したチューニングが行われていることによるものです.
RTK処理の留意点
- 補正データの通信は安定かつ低遅延であることが求められる
- GNSSモジュールとアンテナの性能が精度に大きく影響する
- アルゴリズムごとのFIX率の違いを理解し,用途に応じて使いわける必要がある
まとめ
RTK測位の効果的な運用には,アルゴリズムの選定と通信設計の両面での最適化が必要です.特にリアルタイム処理では,FIX解の連続性と通信の信頼性が重要な要素です.システム構成と処理手法を適切に設計することで,cmレベルの高精度な機首方位角推定が可能になります.
〈著:ZEPマガジン〉
著者紹介
- 2013年 東京大学大学院 総合文化研究科 広域科学専攻 相関基礎科学系 博士課程修了
- 学生時代から現在まで,人力飛行機の電子装備の設計・製作・運用を行う
著書
- PSoCを使用したプロトン磁力計,トランジスタ技術2009年1月号,CQ出版社.
- 舞いあがれ人力飛行機(連載) Interface 2023年2月号~2024年5月号,CQ出版社.
参考文献
- [VOD/KIT] RTKポータブル・センチメートル測位キット,ZEPエンジニアリング株式会社.
- LiDAR×RTK×IMUフュージョン!自動運転&SLAMロボット開発 要点100,ZEPエンジニアリング株式会社.
- [VOD/KIT]SLAMロボット付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- "[VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.