
|
|---|
姿勢角測定に向くのは?
GNSSコンパス vs IMU
GNSSコンパスとIMU,それぞれの姿勢角測定特性
|
|---|
|
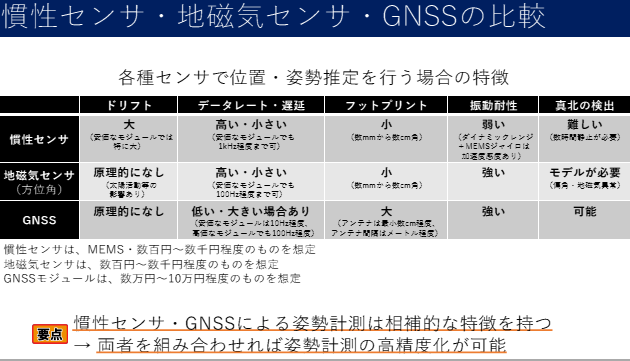
図1 GNSSコンパスとIMUは,それぞれ特性が異なりながらも,補完的に用いることで高精度な姿勢角測定が可能.リアルタイム処理を行う際には,GNSSの遅延とIMUのドリフトに配慮した設計が重要.画像クリックで動画を見る.または記事を読む.[提供・著]樋田 啓 詳細:自動運転&SLAMロボット開発 要点100【セッション5】cm測位「キネマティックGNSS」の始め方 |
姿勢角の測定において,GNSSコンパスとIMU(慣性センサ)は異なる特性をもちます.IMUは加速度計やジャイロ・センサを用いて自律的に角度変化を検出できますが,ドリフト誤差が蓄積しやすいという欠点があります.一方,GNSSは外部衛星信号に基づいて方位を推定するため,長時間の安定性に優れています.
データレートの面では,IMUは1kHz程度の高頻度サンプリングが可能です.GNSSは一般的に10Hz程度であり,高速な動作を伴うアプリケーションには不向きです.また,フットプリントについても,IMUはチップ単体で完結するため小型化に適しますが,GNSSはアンテナを必要とし,大型構成になります.
リアルタイム処理の課題と統合手法
GNSSとIMUを併用することで,両者の短所を補完し合うことが可能です.これにはカルマン・フィルタなどのアルゴリズムを用いたセンサ・フュージョンが用いられます.IMUの高頻度データで時系列的な姿勢角の変化を追い,GNSSの絶対方位情報を観測更新として利用します.
リアルタイムでの統合処理には,データ到着のタイミングのずれが問題になります.GNSSデータはタイムスタンプに対して遅れて届くことがあり,IMUのデータと正しく時間整合を取るために,IMU側の複数フレームのデータ保持と遡り計算が求められます.
GNSSモジュールの選定とその影響
u-blox製GNSSモジュールでは100~200ms程度の通信遅延があり,IMU側の数10フレーム分の記録が必要です.一方,Septentrio製AsteRx-m2a UASモジュールのように,10ms未満の低遅延を実現する機種もあります.こうしたモジュールを選択することで,遅延対策が不要となり,アルゴリズムが大幅に簡素化されます.
GNSSとIMUの統合による姿勢角測定では,センサ選定における遅延時間や精度,搭載スペースの検討が重要です.用途やリアルタイム性の要件に応じた構成が求められます.
まとめ
GNSSコンパスとIMUは,それぞれ特性が異なりながらも,補完的に用いることで高精度な姿勢角測定が可能です.リアルタイム処理を行う際には,GNSSの遅延とIMUのドリフトに配慮した設計が重要です.
カルマン・フィルタとは何か
カルマン・フィルタは,センサから得られる観測値とシステムの予測モデルを統合し,より正確な状態推定を行うためのアルゴリズムです.特にIMUやGNSSのように,異なる性質をもつセンサからの情報を統合するための枠組みとして広く用いられています.
IMUは高頻度で情報を提供しますが,ドリフト誤差を含みます.GNSSは長期安定性がありますが,低速かつ遅延があります.カルマン・フィルタは,IMUによる時間更新とGNSSによる観測更新を交互に実施し,それぞれの長所を活かして正確な姿勢推定を行います.
アルゴリズムの動作原理
カルマン・フィルタでは,まず状態遷移モデルに基づいてIMUのデータから姿勢を予測します.これを時間更新と呼びます.続いてGNSSなど外部から得られた観測情報を用いて予測値を補正します.これが観測更新です.
この2ステップを繰り返すことで,リアルタイムでの状態推定を可能にします.ただし,GNSSのデータが遅延を伴う場合,適切な時間整合が必要です.遅延補償を行わないと,異なる時刻のデータを統合してしまい,誤った推定につながります.
リアルタイム統合における注意点
- GNSSデータのタイムスタンプと実際の到着時間のずれを把握する
- IMUの複数フレーム分のデータを保存し,後から遡って再計算できるようにする
- 遅延の小さいGNSSモジュールを選択し,アルゴリズムの簡素化を図る
特にリアルタイム性が求められる制御系においては,遅延補償処理がボトルネックとなる場合があります.IMUとGNSSの統合を行う設計段階で,使用するモジュールの遅延スペックを確認しておくことが重要です.
まとめ
カルマン・フィルタはIMUとGNSSのようなセンサを統合する際に有効です.センサの特性や遅延を考慮し,時間整合を正確に行うことで,高精度かつリアルタイムな姿勢推定が実現できます.
〈著:ZEPマガジン〉
著者紹介
- 2013年 東京大学大学院 総合文化研究科 広域科学専攻 相関基礎科学系 博士課程修了
- 学生時代から現在まで,人力飛行機の電子装備の設計・製作・運用を行う
著書
- PSoCを使用したプロトン磁力計,トランジスタ技術2009年1月号,CQ出版社.
- 舞いあがれ人力飛行機(連載) Interface 2023年2月号~2024年5月号,CQ出版社.
参考文献
- [VOD/KIT] RTKポータブル・センチメートル測位キット,ZEPエンジニアリング株式会社.
- LiDAR×RTK×IMUフュージョン!自動運転&SLAMロボット開発 要点100,ZEPエンジニアリング株式会社.
- [VOD/KIT]SLAMロボット付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- "[VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.