
|
|---|
GNSSレシーバ利用の注意点
週の切り替わり時
GNSS週切り替わりのしくみと注意点
|
|---|
|
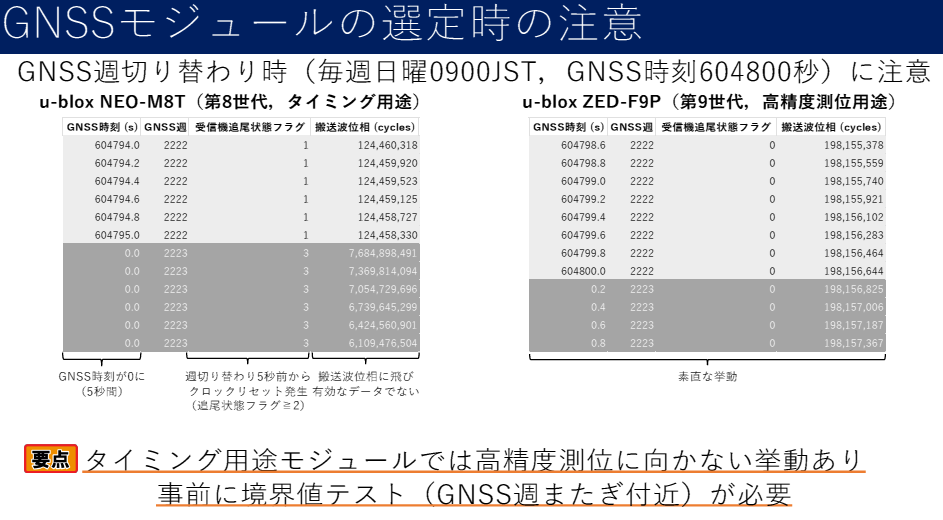
図1 GNSS週切り替わりでは,レシーバの種類によって搬送波位相や追尾状態の挙動が異なる.連続位相を必要とするアプリケーションでは,週またぎ時のリセット挙動を把握し,適切なモジュール選定と事前テストを行うべき.画像クリックで動画を見る.または記事を読む.[提供・著]樋田 啓 詳細:自動運転&SLAMロボット開発 要点100【セッション5】cm測位「キネマティックGNSS」の始め方 |
GNSS(Global Navigation Satellite System)レシーバは,週ごとに内部の時刻カウンタをリセットして新しい週の時刻に移行します.GNSS時刻は1週間で604800秒となり,これを過ぎると再び0秒から始まります.切り替えは日曜の日本時間午前9時(0900JST)で発生します.
この週の切り替わりの瞬間において,特定のGNSSレシーバでは挙動の変化が観察されます.たとえば,u-blox NEO-M8T(第8世代,タイミング用途)では,週切り替え直前の5秒間にクロックリセットが生じ,搬送波位相に大きな飛びが見られます.この状態では追尾状態フラグが3に上昇し,有効な測位データと見なせなくなります.
高精度測位に適したモジュールの動作
一方で,u-blox ZED-F9P(第9世代,高精度測位用途)では,週切り替え時も滑らかで安定した搬送波位相の推移が確認されています.GNSS時刻が604800秒から0秒へ切り替わる際にも,追尾状態フラグは0を維持し,継続的に有効なデータが取得されています.
このような差異は,タイミング用途と測位用途での内部ファームウェアや処理方法の違いに起因しています.タイミング精度を重視する用途では,測位精度よりも時刻保持の再現性が優先されるため,週切り替えの瞬間において時刻の再同期処理が入ることがあります.
週またぎ動作の事前検証が必須
高精度測位用途でGNSSモジュールを使用する場合,週の切り替え時の挙動確認は非常に重要です.設計段階で週の境界近傍でのテストを行い,搬送波位相や追尾状態フラグの変動を観察することが求められます.タイミング系モジュールでは,週切り替えに伴う不連続性が問題になる可能性があるため,連続的なデータが必要なシステムでは注意が必要です.
また,週切り替えによる搬送波位相の急変は,位相連続性を重視する用途,たとえばリアルタイム・キネマティック測位(RTK)において影響を与える可能性があります.このような用途では,第9世代以降の高精度対応モジュールの使用が推奨されます.
GNSS週切り替わりの概要
GNSSの時刻システムでは,1週間を604800秒として扱い,この時間が経過すると0にリセットされます.このしくみは,時刻の表現を単純化し,内部カウンタの扱いを効率的にするために採用されています.GNSS週番号と秒数のペアで現在時刻を表現する形式で,週番号はGNSS時代の開始日(1980年1月6日)からの通算週数です.
この切り替えは世界標準時(UTC)では土曜の23:59:59の次の秒,つまり日曜の0時に発生します.日本標準時(JST)では,ちょうど日曜の午前9時に対応します.この瞬間に,GNSS時刻は604800秒から0秒に戻ります.
実際の影響と動作の違い
すべてのGNSSレシーバがこの切り替えに対して同じ動作をするわけではありません.一部のモジュールでは,週切り替え時に追尾状態フラグが変化し,内部処理が再起動されたような動作を見せます.搬送波位相も不連続となる場合があり,高精度用途では問題になります.
u-blox NEO-M8Tのような第8世代モジュールでは,週切り替えの数秒前からデータの整合性が失われる場合があり,クロックがリセットされることで搬送波の整合性が途切れます.これに対して,ZED-F9P(第9世代)では,搬送波位相が連続しており,週またぎの影響が見られません.
設計時の考慮点
GNSS週切り替わりの影響を最小限に抑えるには,以下の点に注意が必要です.
- 週の切り替えタイミングにおける動作の事前検証を行う
- 搬送波位相の連続性が必要な用途では第9世代以降のモジュールを選定する
- ソフトウェア側で時刻の境界を検出し,データを無視または補正できる設計にする
また,衛星からの信号自体は正確でも,レシーバのファームウェアや構成により,週切り替えの処理方法に差異が出るため,モジュールごとの動作把握が必須です.
GNSS週切り替わりは,レシーバの挙動に大きな影響を与える可能性があります.搬送波位相や追尾状態の変化を事前に理解し,設計段階で確認することで,システムの安定性と精度を確保できます.特にリアルタイム性や連続位相処理を行う応用では,週の切り替えに対応した堅牢な設計が求められます.
〈著:ZEPマガジン〉
著者紹介
- 2013年 東京大学大学院 総合文化研究科 広域科学専攻 相関基礎科学系 博士課程修了
- 学生時代から現在まで,人力飛行機の電子装備の設計・製作・運用を行う
著書
- PSoCを使用したプロトン磁力計,トランジスタ技術2009年1月号,CQ出版社.
- 舞いあがれ人力飛行機(連載) Interface 2023年2月号~2024年5月号,CQ出版社.
参考文献
- [VOD/KIT] RTKポータブル・センチメートル測位キット,ZEPエンジニアリング株式会社.
- LiDAR×RTK×IMUフュージョン!自動運転&SLAMロボット開発 要点100,ZEPエンジニアリング株式会社.
- [VOD/KIT]SLAMロボット付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- "[VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.