
|
|---|
各衛星までの距離算出
GNSS測位のメカニズム
GNSS測位の基本構造
|
|---|
|
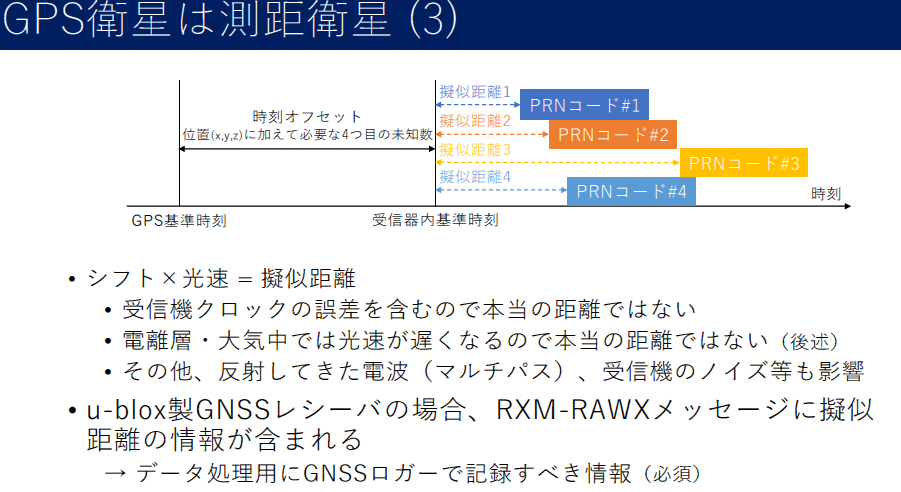
図1 GNSS測位では,複数の衛星からの信号の到達時間差を用いて位置を求める.この際に得られる擬似距離は,時刻オフセットや大気補正などを考慮して処理する.画像クリックで動画を見る.または記事を読む.[提供・著]樋田 啓 詳細:自動運転&SLAMロボット開発 要点100【セッション5】cm測位「キネマティックGNSS」の始め方 |
GNSS(全球測位衛星システム)では,複数の人工衛星から送信される信号をもとに,地上の受信機の位置を求めます.このとき,衛星から信号が届くまでの時間に光速をかけることで,受信機と各衛星との距離に相当する「擬似距離」を得ます.
この擬似距離は「本当の距離」ではありません.信号が通過する大気や電離層によって光速が遅くなるため,測定値には補正が必要です.また,受信機内のクロックに生じる時間オフセットも誤差要因になります.
受信機クロックと時刻オフセット
GNSS測位では受信機の時刻精度が不十分なため,正確な位置を求めるには衛星4つからの信号が必要です.これは,3次元位置($x$,$y$,$z$)に加えて,時刻オフセットを求めるための4つ目の未知数があるからです.同一の受信機ではこのオフセットは共通であるため,衛星ごとの補正は不要です.
衛星信号にはPRNコードと呼ばれる識別信号が含まれており,これにより各衛星の信号を識別できます.PRNコードの到着時間を比較することで,各信号がどれだけ遅れて到着したかがわかります.
測位精度を高めるための工夫
擬似距離だけではm級の測位精度しか得られません.より高精度な測距には,電波の搬送波の位相を利用する方法があります.L1帯(1575.42 MHz)の波長は約19 cmで,位相の測定精度はその1/100程度です.
搬送波の位相を使う場合,何個の波が衛星と受信機の間にあるかが整数として不明であるため,この整数値バイアスを求める必要があります.多周波GNSSを用いると,このバイアスを効率的に解決できます.
また,GNSS信号には「航法メッセージ」が含まれており,衛星の軌道情報や時刻情報などが6秒単位で送信されています.これらの情報は,測位に必要な基準として利用されます.
擬似距離とは何か
擬似距離とは,衛星から送られた信号が受信機に届くまでの時間に光速をかけて得られる距離のことです.この「距離」は実際の物理的な距離とは異なり,受信機のクロック誤差や電波伝搬環境の影響を含んでいます.
GNSS測位では,この擬似距離をもとに複数の衛星との関係から受信機の位置を3次元的に計算します.ただし,受信機の時刻は高精度ではないため,擬似距離には共通の時刻オフセットが含まれます.
擬似距離の誤差要因
- 受信機内クロックの誤差
- 電離層および対流圏の影響
- マルチパスによる反射波の影響
- 受信機内部のノイズ
このような要因によって,擬似距離には複数mの誤差が含まれる場合があります.正確な位置を求めるには,これらを適切に補正する必要があります.
データ処理における擬似距離の活用
u-blox製のGNSSレシーバでは,RXM-RAWXメッセージに擬似距離の情報が含まれており,GNSSロガーで記録すべき必須情報とされています.このデータを解析することで,受信時刻の精度向上や誤差補正が可能になります.
また,擬似距離を使った基本的な測位に加え,搬送波位相を併用することで,より高い精度での位置推定が可能です.測位精度の要求に応じて,適切な処理手法を選択することが重要です.
擬似距離はGNSS測位の出発点であり,受信機が衛星との相対距離を把握するための基本情報です.誤差を多く含みますが,高度な処理によってcm単位の精度に到達する道筋を与えてくれる重要な量です.
〈著:ZEPマガジン〉
著者紹介
- 2013年 東京大学大学院 総合文化研究科 広域科学専攻 相関基礎科学系 博士課程修了
- 学生時代から現在まで,人力飛行機の電子装備の設計・製作・運用を行う
著書
- PSoCを使用したプロトン磁力計,トランジスタ技術2009年1月号,CQ出版社.
- 舞いあがれ人力飛行機(連載) Interface 2023年2月号~2024年5月号,CQ出版社.
参考文献
- [VOD/KIT] RTKポータブル・センチメートル測位キット,ZEPエンジニアリング株式会社.
- LiDAR×RTK×IMUフュージョン!自動運転&SLAMロボット開発 要点100,ZEPエンジニアリング株式会社.
- [VOD/KIT]SLAMロボット付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- "[VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.