
|
|---|
GNSS衛星の搬送波位相で高精度測定
GNSS測位の限界とその克服
L1帯 1575.42MHzの搬送波の波長は約19 cm
|
|---|
|
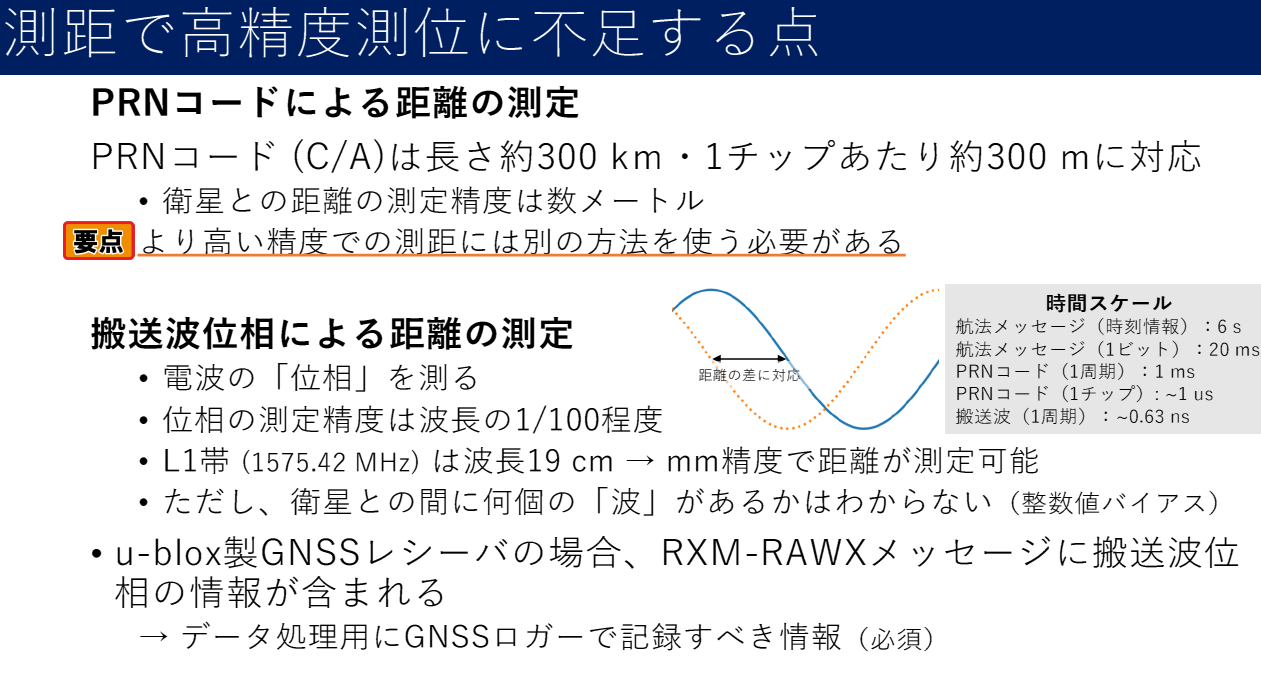
図1 搬送波位相測位の鍵は,見えない「整数値バイアス」の決定.この整数がわかれば,GNSSはmm単位の精度で距離を測定できる.画像クリックで動画を見る.または記事を読む.[提供・著]樋田 啓 詳細:自動運転&SLAMロボット開発 要点100【セッション5】cm測位「キネマティックGNSS」の始め方 |
GNSS測位の基本はPRNコードによる距離測定です.PRNコードはおよそ300 kmの長さをもち,それを1000チップに分けて1チップあたり約300 mに相当します.このコードに基づく距離測定では,受信機の精度により数m程度の位置精度が得られますが,数cmや数mmといった高精度な測位には不十分です.
この限界を克服するために用いられるのが,GNSS信号の搬送波の「位相」を利用した測定手法です.L1帯の搬送波(1575.42 MHz)は,その波長が約19 cmであり,その1周期は約0.63 nsに相当します.この搬送波の位相を測定することで,理論上はmmオーダの精度で距離を推定できます.
位相測定の精度とその課題
搬送波位相測定では,位相精度は波長の1/100程度が一般的で,L1帯であれば数mmの誤差に抑えられます.しかし,位相だけでは距離の「整数倍」部分が不明なため,この未解決な整数を「整数値バイアス」と呼びます.この整数値バイアスの決定が,搬送波位相測位で最大の課題になります.
この問題に対処するためには,多周波GNSS測定が有効です.たとえば,L1とL2を組み合わせることで「ワイドレーン」と呼ばれる人工的な波長(約86 cm)を作り出し,バイアス決定を容易にします.さらにL2とL5を組み合わせることで「エキストラ・ワイドレーン」(約586 cm)を構成し,探索空間を狭めることが可能です.
搬送波位相情報の取得と記録
実際に搬送波位相の情報を利用するには,GNSSレシーバからその情報を取得する必要があります.u-blox製のレシーバでは,RXM-RAWXメッセージに搬送波位相や擬似距離などが記録されています.これらのデータはロガーにより記録し,後の解析に用いることで高精度な測位が可能になります.
また,測位結果が「Fix解」となるためには,整数値バイアスの決定が正しく行われる必要があります.決定できなかった場合は「Float解」となり,その精度はデシm程度にとどまります.Fix率はこのFix解の取得率であり,高精度測位の信頼性を示す指標です.
まとめ
PRNコードによる測距だけでは数mの精度にとどまりますが,搬送波の位相を利用することで理論上はmm精度の測位が可能です.その鍵は「整数値バイアス」の正確な決定にあります.多周波GNSSと搬送波位相データの活用により,GNSS測位の限界を超える高精度な位置推定が実現できます.
搬送波位相測位における見えない壁
搬送波位相を用いた高精度GNSS測位では,波の「位相」を精密に測ることでmm単位の距離精度が期待できます.しかし,位相だけを測っても,衛星との間に何波分の距離があるかはわかりません.これが「整数値バイアス」と呼ばれる未解決の整数です.
整数値バイアスとは,衛星と受信機の間を通過した電波の波の整数個数に関する不確定性です.たとえば波長が19 cmで位相をmm単位で測れても,全体で何個の波があるかがわからなければ,絶対距離は求まりません.この整数を正しく推定することで,初めて高精度な位置情報が得られます.
整数値バイアスを決定する方法
- L1,L2など複数の周波数の信号を利用する
- それらの差周波により,人工的に長い「ワイドレーン」を構成する
- 長いレーン幅により,整数の探索範囲を減らす
- 推定アルゴリズムにより整数を一意に決定する
このようにして,複数周波数を活用することで,探索する候補が少なくなり,バイアスを安定して決定できるようになります.
Fix解とFloat解の違い
整数値バイアスが正しく求まった状態を「Fix解」と呼びます.Fix解が得られれば,測位精度はcmレベルに達します.一方,バイアスが確定できず,連続値のままの場合は「Float解」となり,精度はデシm程度にとどまります.
このFix解をどの程度得られるかを示すのが「Fix率」です.Fix率が高いほど安定した高精度測位が可能であり,GNSS測位の品質評価における重要な指標です.
搬送波位相測位の鍵は,見えない「整数値バイアス」の決定です.この整数がわかれば,GNSSはmm単位の精度で距離を測定できます.多周波の利用と適切な解析によって,この難題に挑むことができます.
〈著:ZEPマガジン〉
著者紹介
- 2013年 東京大学大学院 総合文化研究科 広域科学専攻 相関基礎科学系 博士課程修了
- 学生時代から現在まで,人力飛行機の電子装備の設計・製作・運用を行う
著書
- PSoCを使用したプロトン磁力計,トランジスタ技術2009年1月号,CQ出版社.
- 舞いあがれ人力飛行機(連載) Interface 2023年2月号~2024年5月号,CQ出版社.
参考文献
- [VOD/KIT] RTKポータブル・センチメートル測位キット,ZEPエンジニアリング株式会社.
- LiDAR×RTK×IMUフュージョン!自動運転&SLAMロボット開発 要点100,ZEPエンジニアリング株式会社.
- [VOD/KIT]SLAMロボット付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- "[VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.