











ラズパイ×ROS SLAMロボット開発
ROSホストとWi-Fiクライアントの通信実験
IMUセンサの利用と通信実験
 |
|---|
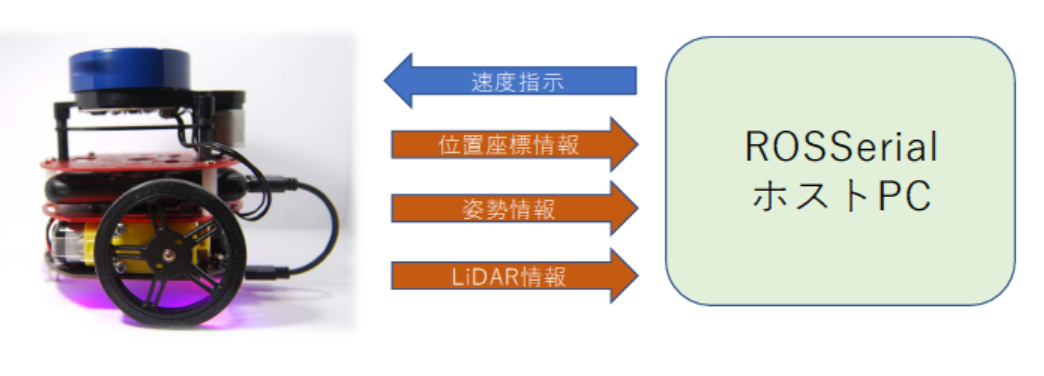
| 図1 ロボット開発用オープンソース・ミドルウェアROSをラズベリー・パイ・ホストで,Wi-Fiマイコンを搭載したクライアント・ローバからIMUセンサ情報をリモート受信する実験をしてみた.画像クリックで動画を見る.または記事を読む.[提供・著]砂川 寛行 |
ラズベリー・パイとROSの統合によるSLAMロボット構築
ROS(Robot Operating System)は,ロボット開発のためのオープンソース・ミドルウェアであり,多様なセンサやアクチュエータとの統合が容易です.この実験用SLAMロボットはWi-Fiクライアントとして機能し,IMUセンサ情報をROSホストへ送信して,動的な位置推定と地図生成を実現します.
IMUセンサの役割と活用方法
IMUセンサ(Inertial Measurement Unit)は,ロボットの角速度や加速度を計測するデバイスで,ロボットの動作状態をリアルタイムに把握するために欠かせません.SLAM(Simultaneous Localization and Mapping)システムでは,IMUセンサ・データがLiDARやカメラからの情報と統合され,ロボットの位置推定や経路計画に利用されます.
IMUセンサ・データは,ROSノード間でトピックとして送受信されます.トピック名 `/imu/data` を使用して,IMUセンサから得られる回転速度($\omega_x, \omega_y, \omega_z$)や加速度($a_x, a_y, a_z$)をほかのノードがサブスクライブできます.これにより,以下のような応用が可能です.
- ロボットの傾き補正と安定化
- 障害物回避のためのリアルタイム制御
- 地図生成アルゴリズムへのデータ提供
Wi-Fi通信実験のポイント
このSLAMロボットは,ラズベリー・パイ4をROSホストとして,Wi-Fi経由でESP32と通信します.この通信は,ROSSerialライブラリを用いて実現され,センサ・データや制御コマンドの送受信が可能です.以下は構成の主要なポイントです.
- ネットワーク設定
Wi-Fiルーターを通じて,ラズベリー・パイとESP32を接続します.ラズベリー・パイのIPアドレスは事前に固定化(例:`192.168.0.147`)しておくと便利です
- データの送受信
ESP32は,IMUセンサ・データをI$^2$Cで取得し,シリアル通信を通じてラズベリー・パイに送信します.ラズベリー・パイ側では,ROSSerialがシリアルデータをトピックとして公開します
通信の信頼性を確保するためには,以下の点に留意します.
- Wi-Fiの信号強度を確保し,通信の遅延を最小化する
- シリアル通信でのデータ損失を防ぐため,適切なバッファリングを設定する
- トピック名とデータ形式を統一してノード間の互換性を保つ
IMUセンサ・データがSLAMに果たす役割
SLAMにおけるセンサ・フュージョンの重要性
SLAMは,未知の環境でロボットが自律的に地図を生成しつつ,自身の位置を推定する技術です.このプロセスでは,複数のセンサ・データを組み合わせる「センサ・フュージョン」が不可欠です.IMUセンサは,その軽量性とリアルタイム性から,SLAMシステムにおいて次のような役割を果たします.
- 短期的な位置推定
IMUセンサは高頻度でデータを提供できるため,瞬時の位置変化や姿勢の推定に優れています
- LiDARやカメラデータの補完
LiDARやカメラは環境情報を取得しますが,障害物や視界の制限によってデータが欠落する場合があります.この場合,IMUセンサが安定した位置推定をサポートします
データ処理と誤差補正
IMUセンサ・データには,次第に累積する「ドリフト誤差」が含まれます.この誤差を補正するためには,以下の技術が利用されます.
- フィルタリング
カルマン・フィルタや拡張カルマン・フィルタ(EKF)を用いて,IMUセンサ・データとほかのセンサ・データを統合し,信頼性の高い推定値を算出します
- リセット処理
定期的にLiDARやカメラによる絶対位置測定を基準に,IMUセンサの推定値をリセットします
IMUセンサとROSの統合
ROS環境では,IMUセンサ・データは標準的なメッセージ型(sensor_msgs/Imu)でパブリッシュされます.このデータを処理するために,以下のようなノードを作成するのが一般的です.
- センサ・データの記録と解析用ノード
- センサ・フュージョンアルゴリズムを実装するノード
- 地図生成アルゴリズムにデータを提供するノード
〈著:ZEPマガジン〉
著者紹介
- 1994年 事務機器メーカ入社.エレクトロニクス関連の開発と設計.2016年 CQ出版社 トランジスタ技術にマイコンやロボット関連の技術解説記事を寄稿.Maker Fair Tokyoに出展.マイコン4足歩行ロボット製作キット「クワッドクローラ」を開発.ESP32を使用した小型のSLAMロボットを開発2022年 ZEPエンジニアリング社にて,キット付きウェブセミナ [VOD/Pi4 KIT] SLAMロボット&ラズパイ付き!ROSプログラミング超入門」の講師を行う
著書
- [VOD/KIT]SLAMロボット付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- 5ドルI/Oコンピュータ「ラズパイZero」の研究,トランジスタ技術2016年3月号,CQ出版社.
- 付録Xホビー・スパコンで科学の実験 プロローグ~第3章,トランジスタ技術2016年8月号,CQ出版社.
- 全実験室に!高IQアルディーノ基板(記事および付録基板設計),トランジスタ技術2017年2月号,CQ出版社.
- トラ技ポケコン「I/OSOLDIER」の製作,トランジスタ技術2018年2月号,CQ出版社.
- LiDARで自己位置推定!1万円自立移動ロボット「PiBoT」,トランジスタ技術2019年10月号から隔月連載,CQ出版社.
- スピード製作!初歩の遠隔制御ロボット,トランジスタ技術2020年12月号,CQ出版社.
参考文献
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズパイ×Node-REDで作ろう!IoTアプリ開発入門,ZEPエンジニアリング株式会社.
- [VOD/Pi3A KIT]ラズパイ・キットで学ぶLinux I/Oボードの作り方・探し方・動かし方,ZEPエンジニアリング株式会社.