











今さら聞けない ディープラーニング入門
文字データベース MNISTでAI性能評価
ラズパイで作る文字認識AIカメラとMNISTの実験
 |
|---|
| 図1 MNISTデータ・セットは0~9の手書き数字画像を含むベンチマークデータ・セットで,ディープニューラル・ネットワーク(DNN)の基本的なしくみを学ぶのに最適.画像クリックで動画を見る.または記事を読む.[提供・著]井上 祐寛 |
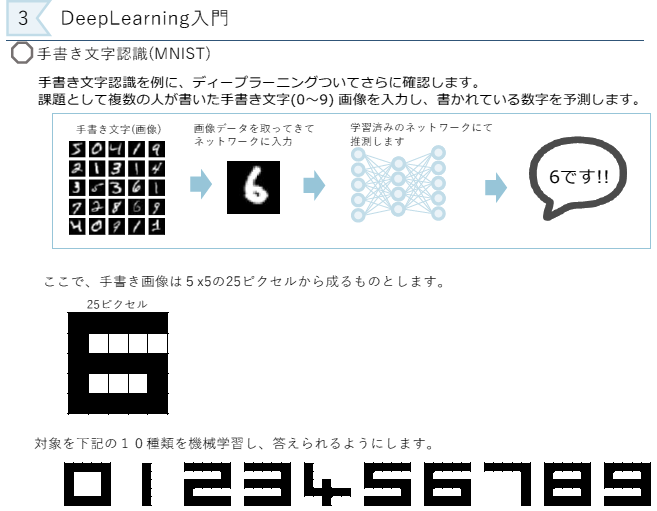
手書き文字認識はディープラーニングを活用したもっとも基本的で実用的なアプリケーションの1つとなりました.MNISTデータ・セットは0~9の手書き数字画像を含むベンチマークデータ・セットで,ディープニューラル・ネットワーク(DNN)の基本的なしくみを学ぶのに最適です.
ラズパイで文字認識AIカメラを作るしくみ
ラズベリー・パイにカメラ・モジュールを接続し,撮影した手書き文字画像をAIモデルに入力して認識を行います.このモデルは,TensorFlowやKerasなどのライブラリを使用して事前にトレーニングされたものを利用します.
1.データの入力と前処理
カメラで撮影した画像を取得し,MNISTデータ・セットに準じた28×28ピクセルのグレースケール画像にリサイズします.さらに,画像データを正規化し,ニューラル・ネットワークが処理しやすい形式に変換します.
2.モデルの構造
ニューラル・ネットワークは,入力層,中間層,出力層で構成されます.入力層は28×28ピクセル(784次元)のデータを受け取り,中間層ではReLU関数を用いて非線形性を導入します.出力層には10個のノードがあり,それぞれが数字0~9を表します.ソフトマックス関数により確率値を計算し,最大値を予測結果とします.
3.リアルタイム認識
画像をAIモデルに入力し,認識結果を表示します.例えば,”6″がもっとも高い確率で予測された場合,「この画像は ‘6’ です」といった結果を出力します.
MNISTを用いた実験と学習の流れ
MNISTデータ・セットは,ディープラーニングの教育や実験で広く利用されています.以下はその実験の流れです.
1.データ・セットの可視化と準備
MNISTのデータ・セットは28×28ピクセルの画像で構成され,訓練データとテスト・データにわかれています.画像を視覚的に表示して確認することで,モデルが学習する対象を理解しやすくなります.
2.学習と最適化
損失関数にはクロス・エントロピを使用し,最適化アルゴリズムにはAdamを採用します.これにより,学習率$L_r$や重みが効率的に調整されます.ランダムにノードを無効化するDropoutを用いて過学習を防ぎ,汎化性能を向上させます.
3.精度の評価
学習後,テスト・データを用いて精度を確認します.結果は混同行列やグラフで可視化され,各クラスの識別性能を詳しく分析できます.
損失関数と最適化アルゴリズム
損失関数の役割
損失関数は,モデルが出力する予測値と教師データ(正解ラベル)との誤差を数値化する指標です.例えば,MNISTの実験ではクロス・エントロピ損失関数を用いています.この関数は,モデルが出力する確率分布と正解ラベルの分布との差を計算します.損失が小さいほど,モデルの予測が正解に近いことを示します.
数式的には,クロス・エントロピ損失は次のように定義されます:
[
\text{Loss} = -\sum_{i=1}^{N} y_i \log(\hat{y}_i)
]
ここで,$y_i$は正解ラベル,$\hat{y}_i$はモデルの予測確率です.
最適化アルゴリズムの重要性
最適化アルゴリズムは,損失を最小化するためにモデルのパラメータ(重みやバイアス)を調整する手法です.MNISTでは,Adam(Adaptive Moment Estimation)が使用されます.これは,勾配の移動平均と分散を同時に考慮するアルゴリズムで,学習の収束が早く,安定性に優れています.
学習率$L_r$はAdamの重要なハイパ・パラメータの1つで,過剰適合を防ぎつつ高速な収束を実現するために適切に設定される必要があります.
以上の解説を通じて,ラズパイを活用した文字認識AIカメラの構築方法やMNISTを用いたディープラーニングの基礎について理解が深まることでしょう.〈著:ZEPマガジン〉
7
著者紹介
- 株式会社クレスコ入社後,銀行向けシステムなど数多の開発にリード・エンジニアとして従事.後に自社ソリューションとなる統合認証システムの基礎を独力で開発するなど,アイデアと技術でクレスコを牽引する.技術研究所での機械学習研究を経て,人工知能を強みとする部門に異動.現在はテクニカルエバンジェリストとして企業が持つ業務課題へのAI適用に関するコンサルティング,機械学習に関する技術支援を行う一方,自ら研究テーマを持ち共同研究,実験システムの構築も担当.「SoftwareDesign」「やってみよう!機械学習」(技術評論社),「日経ソフトウェア」「AIプログラマになれる本」(日経BP)への記事寄稿,会津大学,はこだて未来大学,琉球大学,早稲田大学のほかWatson SummitやMicrosoftでの講演等,社外でも精力的に活動中
著書
- ラズパイ+USB SDRで作るFlightradar24 Businessアカウント・フィーダ,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]世界の航空機を同時追跡!Flightradar24 ラズパイ・キット,ZEPエンジニアリング株式会社.
- [VOD/KIT]人工知能カメラM5StickVで作って学ぶ画像解析AI開発入門,ZEPエンジニアリング株式会社.
- いろんなことを試して学ぶ! Pythonプログラミング,2021年,日経BP.
- エッジAIプログラミング M5StickV 活用編,日経ソフトウェア2020年11月号,日経BP.
- エッジAIプログラミング M5StickV 準備編,日経ソフトウェア2020年7月号,日経BP.
- Kaggleに参戦しよう(連載),日経ソフトウェア2020年1月号,日経BP.
- Kaggleに参戦しよう(連載),日経ソフトウェア2019年9月号,日経BP.
- Kaggleに参戦しよう(連載),日経ソフトウェア2019年7月号,日経BP.
- AIプログラマになれる本,2019年,日経BP.
- やってみよう! 機械学習 第2章 機械学習の始め方,2019年,技術評論社.
- 人工知能で画像生成 応用編,日経ソフトウェア2019年1月号,日経BP.
- 人工知能で画像生成 基本編,日経ソフトウェア2018年11月号,日経BP.
- 自分で構築するか,APIで機能を使うか 機械学習の始め方,Software Design2018年4月号,技術評論社.
参考文献
- [VOD/Pi3A KIT]ラズパイ・キットで学ぶLinux I/Oボードの作り方・探し方・動かし方,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/PiZero KIT]Python×ラズパイで初めての量子コンピュータ,ZEPエンジニアリング株式会社.
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.