モータ/アクチュエータ
ベクトル制御をはじめとするDCブラシレス・モータの高効率駆動アルゴリズム,トルクや回転を検出する各種メカトロ・センサの活用術,インバータの回路設計などを解説します.
ZEPマガジン

|
1石のトランジスタから電子回路の基本と設計法を学ぶ
オームの法則/トランジスタからMOSFET/OPアンプまで!電子回路設計を実体験 |
|
ゲート駆動の高速化による発熱とサージのトレードオフ
壊れない!壊さない!失敗だらけの電源・インバータ設計 |
|
大電流対応に安易な層数増しは危険
壊れない!壊さない!失敗だらけの電源・インバータ設計 |
|
想定外のVIAホール焼損
壊れない!壊さない!失敗だらけの電源・インバータ設計 |
|
パワエレの故障原因探しは破壊と作り直しの連続
壊れない!壊さない!失敗だらけの電源・インバータ設計 |

|
シミュレータはベテランになってから使うツール
壊れない!壊さない!失敗だらけの電源・インバータ設計 |

|
壊れない!壊さない!失敗だらけの電源・インバータ設計
MOSFETの配線インダクタンスと危険なサージ |
|
MATLAB/Simulink入門 ADCを読んでLED制御
コードレス・プログラミング環境 Simulinkでモデルベース設計 |

|
MATLAB/Simulink入門 なぜ,MATLABのか
演算に特化!C言語より簡単記述&高速処理 |

|
Matlab/Simulink入門 センサ計測値の信号処理
ライン・トレース・ロボットの目を作る |
|
|
MATLAB/Simulink入門 ON/OFF制御 vs PID制御
誤差の多いBang Bang制御の誤差を改善 |

|
ドローン制御工学入門 M5Stamp Flyの傾き角推定
カルマン・フィルタの軽量版「マドウイック・フィルタ」を採用 |

|
飛行制御ファーム無料!2万円ドローンM5Stamp Fly誕生
安全性good!制御工学教材に最適 |

|
M5Stamp Flyドローンのブレを軽減する2つのセンサ
垂直はToF,水平はオプティカル・フロー・センサ |

|
M5Stamp Flyドローンのブレを安定化する2つのセンサ
垂直はToF,水平はオプティカル・フロー・センサ |

|
$50ドローン・キット“M5Stamp Fly”の制御プログラミング
クアッドコプタの運動原理 |

|
高校生から始めるArduinoマイコン プログラミング実験室
Lチカからモータ制御まで!すぐ動く全32個のソースコードを公開 |

|
多関節アームの操作に!状態フィードバック制御入門
数学からモデリベース設計まで,学ぶべきことの全体像 |
|
ロボティクス入門 現実にモデルを近付ける
理想に「不確かさ」を足す |
|
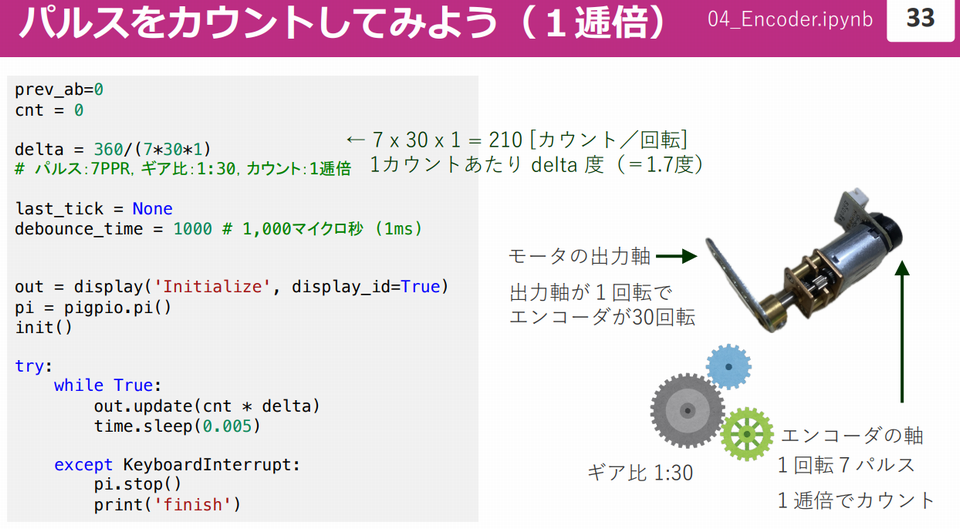
ロボティクス入門 エンコーダで回転を測る
回転方向/角度/速度を測る最重要センサ |

|
ロバスト制御のモデリング 実物との差分の表現
「ロバスト制御のモデリング 実物との差分の表現」の解説ページです |

|
Pythonで一緒に!ロボット制御のモデルベース設計
安定余裕を確保して制御系をロバストにする |
VOD教材[視聴無制限]
|
[VOD/Book]Pythonで一緒に!ロボット制御のモデルベース設計【ロバスト制御編】 |
|
[VOD/Book]Pythonで一緒に!ロボット制御のモデルベース設計[状態フィードバック制御編]
|

|
[VOD/Book]Pythonで一緒に!ロボット制御のモデルベース設計【PID制御編】 |

|
[VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門
|

|
[VOD/Pi2W KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門【改訂版】 |
|
|
[VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門 |
|
|
[VOD/KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門 |