
|
|---|
SLAMロボット入門 部屋の形をLiDAR計測
ROSの地図表示ライブラリ RViz で測距データから個室イメージを作成

|
|---|
ROS搭載ラズパイでSLAMロボットを自作
|
|---|
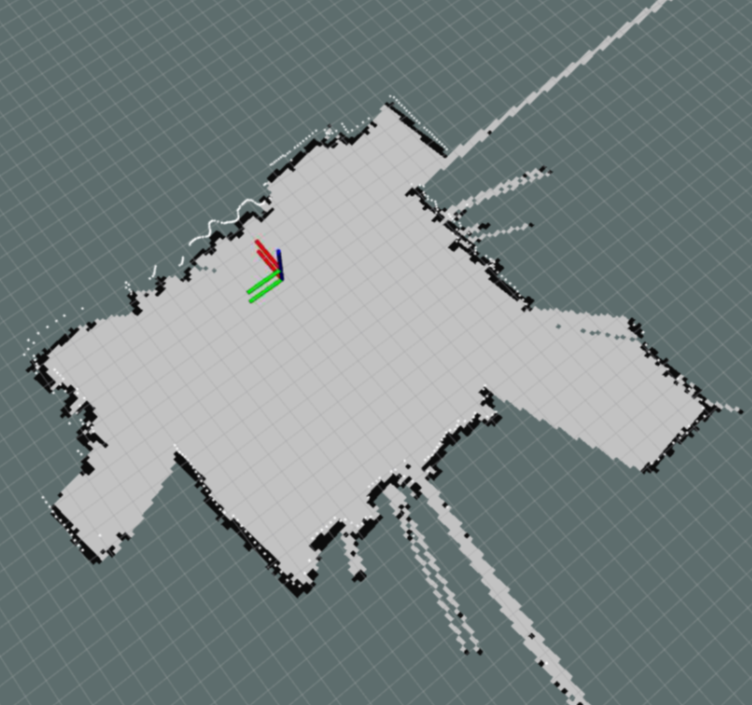
| 図1 SLAMは自己位置を推定しながら環境地図を作る自律移動ロボット開発向けの技術.LiDARを使って部屋の形を計測し,ROS搭載のラズベリー・パイでSLAMを試す.[著・提供]砂川 寛行.画像クリックで動画を見る.または記事を読む.詳細は[VOD/Pi4 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門 |
部屋の形をLiDAR計測し,ラズパイでROSを活用するSLAMロボット
SLAM(Simultaneous Localization and Mapping)は,自律移動ロボットにおいて,自己位置を特定しながら環境の地図を作成する技術です.
この技術は,ロボットが未知の環境で障害物を回避しながら移動する際に,非常に重要な役割を果たします.ここでは,LiDARセンサを使用して部屋の形を計測し,ラズベリー・パイで ROS(Robot Operating System)を使ってSLAMを実現する方法について詳述します.また,地図アプリのRVizで測距値を確認する方法にも触れます.
LiDARを用いた計測とそのメリット
LiDAR(Light Detection and Ranging)は,レーザ光を用いて距離を測定するセンサです.
この技術は,非常に高い精度で周囲の環境を計測することができ,特に部屋の形や障害物の位置を迅速に把握することが可能です.LiDARは次のステップで使用されます.
- レーザを環境に照射
- 反射光の時間を計測し,距離を算出
- 得られた距離データを用いて周囲の環境を2Dまたは3Dで再現
SLAMロボットにおいて,LiDARはロボットが正確な自己位置を特定するための重要なデバイスであり,ROSを通じてデータを処理し,リアルタイムで地図を更新します.
ROSを使ったSLAMの実装
ラズベリー・パイにROSをインストールすることで,低コストかつ手軽にSLAMシステムを構築できます.ROSは,ロボット制御やセンサ・データの処理を容易に行うためのオープンソース・フレームワークで,多くのライブラリやツールが提供されています.
まず,LiDARセンサをラズパイに接続し,ROSを通じてLiDARデータを取得します.このデータは,ROS内のSLAMライブラリによって処理され,リアルタイムに環境の地図が生成されます.
SLAMには,多くのアルゴリズムが存在し,$g_m$appingやCartographerといったライブラリが一般的に使用されます.これらのライブラリを使用することで,効率的なマッピングとロボットの自己位置推定が可能です.
キーワード
1. SLAM(Simultaneous Localization and Mapping)
SLAMは,ロボットが未知の環境内で自己位置を推定しながら,その環境の地図を同時に作成する技術です.
これは,自己位置推定とマッピングを並行して行うという複雑なタスクを実現するため,確率論的手法やフィルタリング技術が使用されます.特に,拡張カルマンフィルタ(EKF)や粒子フィルタがSLAMで広く採用されています.
2. LiDAR(Light Detection and Ranging)
LiDARは,レーザ光を使って物体までの距離を測定する技術です.
このセンサは,360°の範囲で環境をスキャンすることが可能で,SLAMにおいては環境の地図を高精度に作成するための必須デバイスです.LiDARから得られるデータは,距離と角度情報であり,これらを用いて2Dまたは3Dの地図を生成します.
3. ROS(Robot Operating System)
ROSは,ロボット制御やセンサデータの処理を効率化するためのオープンソースプラットフォームです.
LiDARセンサやモータなど,複数のハードウェアを統合し,データを処理・制御するためのフレームワークを提供します.特に,SLAMやナビゲーションのための強力なライブラリが揃っており,初心者からプロまで幅広く利用されています.ROSの最大の特徴は,ノードと呼ばれるモジュールが分散して動作することにより,ロボットの複雑な処理を並行して行える点です.
4. Rviz
RViは,ROSの可視化ツールであり,SLAMで取得したデータをリアルタイムで確認できるアプリケーションです.LiDARから取得した測距データや,作成された地図を3D空間で表示し,ロボットの自己位置や障害物の位置を確認できます.〈著:ZEPマガジン〉
著者紹介
- 1994年 事務機器メーカ入社.エレクトロニクス関連の開発と設計
- 2016年 CQ出版社 トランジスタ技術にマイコンやロボット関連の技術解説記事を寄稿.Maker Fair Tokyoに出展.マイコン4足歩行ロボット製作キット「クワッドクローラ」を開発.ESP32を使用した小型のSLAMロボットを開発
- 2022年 ZEPエンジニアリング社にて,キット付きウェブセミナ [VOD/Pi4 KIT] SLAMロボット&ラズパイ付き!ROSプログラミング超入門」の講師を行う
著書
- [VOD/KIT]SLAMロボット付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/Pi400 KIT]SLAMロボット&ラズパイ付き!ROSプログラミング超入門,ZEPエンジニアリング株式会社.
- 5ドルI/Oコンピュータ「ラズパイZero」の研究,トランジスタ技術2016年3月号,CQ出版社.
- 付録Xホビー・スパコンで科学の実験 プロローグ~第3章,トランジスタ技術2016年8月号,CQ出版社.
- 全実験室に!高IQアルディーノ基板(記事および付録基板設計),トランジスタ技術2017年2月号,CQ出版社.
- トラ技ポケコン「I/OSOLDIER」の製作,トランジスタ技術2018年2月号,CQ出版社.
- LiDARで自己位置推定!1万円自立移動ロボット「PiBoT」,トランジスタ技術2019年10月号から隔月連載,CQ出版社.
- スピード製作!初歩の遠隔制御ロボット,トランジスタ技術2020年12月号,CQ出版社.
参考文献
- [VOD/Pi KIT]MATLAB/Simulink×ラズパイで学ぶロボット制御入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズパイ×Pythonで動かして学ぶモータ制御入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶエッジAIプログラミング入門,ZEPエンジニアリング株式会社.
- [VOD/Pi KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズベリー・パイで学ぶLinux&Pythonプログラミング超入門,ZEPエンジニアリング株式会社.
- [VOD/KIT]ラズパイ×Node-REDで作ろう!IoTアプリ開発入門,ZEPエンジニアリング株式会社.
- [VOD/Pi3A KIT]ラズパイ・キットで学ぶLinux I/Oボードの作り方・探し方・動かし方,ZEPエンジニアリング株式会社.