ZEPマガジン
|
2025年9月8日号
[ノイズ/放熱対策][基板/実装/3Dプリンタ]
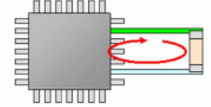
セラミック・キャパシタのESLの正しい理解 プリント基板EMC Q&A ESLはキャパシタ単体の固有値ではなく,キャパシタが接続される回路構成や電流ループによって大きく変化する |

|
2025年9月7日号
[ノイズ/放熱対策][基板/実装/3Dプリンタ]
基板が薄いならパスコンは位置より量が重要 プリント基板EMC Q&A 電源層とGND層の間隔が小さい基板では,各キャパシタの位置精度はそれほど影響を与えない.重要なのは,大電流を引き出すIC付近に十分な数を配置すること |

|
2025年9月6日号
[ノイズ/放熱対策][基板/実装/3Dプリンタ]
高周波の磁界は銅配線に浸透する? プリント基板EMC Q&A 銅のように導電率が高い材料ほど,入射磁界を打ち消す渦電流と逆向きの磁界が生じるため,銅板や銅配線の内部には磁界が浸透しにくい |
|
2025年9月5日号
[ノイズ/放熱対策][基板/実装/3Dプリンタ]
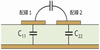
並走2線間の容量と基板の厚み プリント基板EMC Q&A 相互キャパシタンスの減少は,容量性クロストークの低減に直結する.容量性クロストークは$C_{12}$に比例するため,基板厚を小さくすることで信号干渉を抑制できる |

|
2025年9月4日号
[ノイズ/放熱対策][基板/実装/3Dプリンタ]
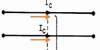
往路電流と復路電流がつくる磁界 プリント基板EMC Q&A 往路と復路の両者がそろってはじめて電流ループが閉じ,その周囲に磁界が生じる.往路と復路の配置は,磁界強度や放射ノイズの大小に直接関係する |

|
2025年9月3日号
[ノイズ/放熱対策][基板/実装/3Dプリンタ]
高速信号-裏面グラウンド間の電界に着目せよ プリント基板EMC Q&A 電界が強いほど基板内の寄生容量が増し,不要な結合やクロストークが生じる.高速信号を配線するときは,信号線の高さを無闇に下げすぎないようにする |
|
2025年9月2日号
[ノイズ/放熱対策][基板/実装/3Dプリンタ]
差動と同相 電流は2種類 プリント基板EMC Q&A ディファレンシャル・モード電流とコモン・モード電流を区別して理解することが,不要なノイズを抑える基板設計の必須事項 |
|
2025年9月1日号
[信号処理/セキュリティ][電磁気/数学/統計/力学]
量子鍵配送プロトコルBB84の仕組み 量子技術とサイバーセキュリティの関係 量子計算機による暗号解読の脅威への対策の1つは,古典的な計算資源で解読が困難な耐量子暗号の研究.もう1つはBB84のように量子力学の原理に基づいて安全性を確保する量子通信 |
|
2025年8月31日号
[電源/電池/パワエレ]
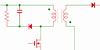
フライバック・コンバータの回路設計事例 制御ICの選択から保護回路まで USB電源供給下での安全性と低リプル化を重視し,ポリスイッチやLCフィルタを用いて安定した出力を実現するフライバック・コンバータ設計事例 |

|
2025年8月30日号
[電源/電池/パワエレ]
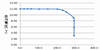
電源用絶縁トランスの1次巻き数の計算と磁束密度 フライバック・コンバータの絶縁トランス設計 電流容量,巻き数,線径を満たした安全で効率的なフライバック・コンバータ用の絶縁トランスの設計事例 |

|
2025年8月29日号
[電源/電池/パワエレ]
電源用絶縁トランスのコア材質とエネルギ蓄積容量 フライバック・コンバータの絶縁トランス設計 トランスのコア材質とサイズは,必要なエネルギ蓄積容LI^2に応じて決める.扱えるエネルギ量には上限があり,1次インダクタンスと最大電流の積で求める |
|
2025年8月28日号
[電源/電池/パワエレ]
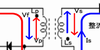
フライバック・コンバータのスイッチング電流と電圧 出力電圧制御と巻き線比と運転モードの選択 フライバック・コンバータの出力電圧は,負荷で消費される電力とインダクタに蓄積されるエネルギのバランスで決まる |
|
2025年8月27日号
[電源/電池/パワエレ]
絶縁型スイッチング電源の回路方式の超定番 フライバック絶縁電源の基本原理 絶縁型スイッチング電源の回路方式の超定番はフライバック方式.1次側SW ONのときトランスにエネルギを蓄え,OFFのときに出力側にエネルギを放出する |

|
2025年8月26日号
[AI/IoT/マイコン][ロボット/自動運転/宇宙]
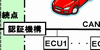
CANネットワークのパケット解析力の実習教材 CANネットワークを活用したパケット解析力の実習教材の解説ページ Raspberry Piを使用し、ECUエミュレータに接続されたCANネットワーク上で、通信パケットの解析やなりすまし演習できる |

|
2025年8月25日号
[AI/IoT/マイコン][ロボット/自動運転/宇宙]
ゼロ知識からのADAS機能解析 バスオフ攻撃と完全なりすまし装置 バスオフ攻撃は,CANバス上で特定のECUを意図的に離脱させる手法.ターゲットECUが送信したフレームを連続してエラーにすることで,エラー・カウンタを上昇させバスオフ状態に遷移 |
|
2025年8月24日号
[AI/IoT/マイコン][ロボット/自動運転/宇宙]
通信内容や仕様が未公開でもデータ構造や挙動を解析する手法 車載CANプロトコルのゼロ知識解析とは ゼロ知識解析とは,通信内容や仕様が公開されていない状態でもデータの構造や挙動を解析する手法 |
|
2025年8月23日号
[信号処理/セキュリティ][AI/IoT/マイコン]
STM32N6マイコンのコード改ざん防止とブートローダの運用 Arm TrustZone対応!SecureとNon-Secureの2状態切り替え STM32N6は組み込みシステムにおけるセキュリティを重視したマイコン.CPUはArm TrustZoneに対応し,SecureとNon-Secureを切り替えられる |

|
2025年8月22日号
[信号処理/セキュリティ][AI/IoT/マイコン]
STM32N6のAI サンプル(Object Detection) と評価指標 ビルドと実行,評価指標と精度の確認 NPU搭載のエッジ推論用マイコンSTM32N657の開発環境にはAIサンプルが提供されており、組み込みシステムでAIモデルの動作確認が可能 |

|
2025年8月21日号
[信号処理/セキュリティ][AI/IoT/マイコン]
リアルタイム推論対応の組み込みシステム開発 STM32N6マイコンの畳み込みアクセラレータ STM32N657はディープニューラルネットワーク(D-NN)に特化し、組み込み機器におけるリアルタイム推論を可能にする |

|
2025年8月20日号
[信号処理/セキュリティ][AI/IoT/マイコン]
600GOPS NPU搭載STM32N6マイコンでリアルタイムAI画像処理 STM32N6とエッジAIカメラ開発の位置づけ 600GOPSのNPUを搭載するマイコンSTM32N6はリアルタイムの画像処理を組み込み機器で実現できる |