ロボット/自動運転/宇宙
センチメートル精度のGPS測位“RTK”,LiDAR/カメラ/レーダ/IMUセンサによる自己位置推定とマッピングを組み合わせたSLAM,確率統計処理によって真値を高速推定するカルマン・フィルタなど,無人搬送機開発の技術を解説します.
ZEPマガジン
|
大域奇跡最適化とポーズ・グラフの実習
Jetson Orin Nano×3D LiDAR:リアルタイムSLAM入門 |

|
フレーム前後の点群位置を補正:高精度地図生成アルゴリズム
スイープ機構による点群のひずみ |

|
位置・誤差・時刻の関係性を可視化&最適化
全体誤差を最小化するアルゴリズム「ファクタ・グラフ」 |
|
点群量の削減と形状保持:ダウン・サンプリング法
空間を立方体分割:代表点選定,点群再構築 |
|
GPUで最新と過去のキー・フレームを丸ごと最適化
移動経路推定アルゴリズム:GLIM |
|
CLAS vs RTK 測位精度比べ
単独高精度測位 みちびき補正信号CLAS入門 |
|
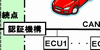
通信内容や仕様が未公開でもデータ構造や挙動を解析する手法
車載CANプロトコルのゼロ知識解析とは |

|
ゼロ知識からのADAS機能解析
バスオフ攻撃と完全なりすまし装置 |

|
CANネットワークのパケット解析力の実習教材
CANネットワークを活用したパケット解析力の実習教材の解説ページ |

|
車載CANプロトコルの基礎とゼロ知識解析
実車での解析と攻撃手法の検証 |

|
衛星+地上基準局!一般的なRTK測位システムの構成
単独高精度測位 みちびき補正信号CLAS入門 |
|
NTRIPサーバが出す“RTCM”データ
単独高精度測位 みちびき補正信号CLAS入門 |

|
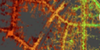
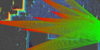
樹木下でのRTK測位の実験と精度評価
単独高精度測位 みちびき補正信号CLAS入門 |

|
基準点データを配信するしくみ
単独高精度測位 みちびき補正信号CLAS入門 |

|
マルチバンドRTK 実際の製品と実力
単独高精度測位 みちびき補正信号CLAS入門 |

|
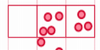
2つの測位解//FloatとFix,単独高精度測位//みちびき補正信号CLAS入門
単独高精度測位 みちびき補正信号CLAS入門 |

|
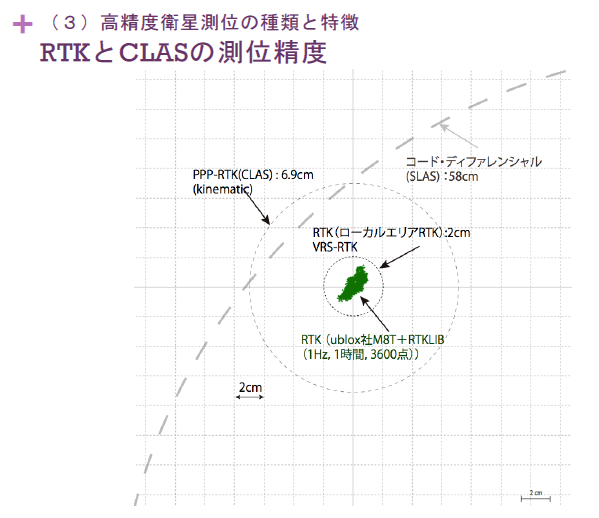
高精度測位の新たな選択肢:CLASとRTKの比較
単独高精度測位 みちびき補正信号CLAS入門 |

|
F9P+D9Cで実現!CLASレシーバ
単独高精度測位 みちびき補正信号CLAS入門 |

|
1石のトランジスタから電子回路の基本と設計法を学ぶ
オームの法則/トランジスタからMOSFET/OPアンプまで!電子回路設計を実体験 |
|
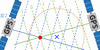
衛星測位の原理は三角測量
0.4°精度GNSSコンパスの実験と製作 |
|
GPS衛星が出す電波
5チャネル以上の周波数を送信 |

|
u-blox F9Pを2個使い!GNSSコンパスの原理と構成
0 4°精度GNSSコンパスの実験と製作 |

|
GNSS衛星までの距離算出法
0 4°精度GNSSコンパスの実験と製作 |

|
GNSSレシーバ利用の注意点
0 4°精度GNSSコンパスの実験と製作 |
|
|
各GNSS衛星までの距離算出
GNSS測位のメカニズム |

|
GNSSモジュールの実装
高周波センスで基板設計 |

|
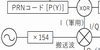
GNSS衛星の搬送波位相で高精度測定
L1帯 1575.42MHzの搬送波の波長は約19 cm |

|
空力と高精度測位の両立を目指したアンテナ選定
RTKレシーバ用アンテナ スタック型パッチとヘリカル |

|
多周波対応GNSSレシーバの信号処理
整数値バイアスの決定 |
|
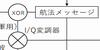
GNSS放送データ「航法メッセージ」の中身
時刻/衛星位置/軌道/補正データほか |
|
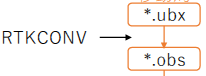
GNSSレシーバのデータ処理ソフト RTKLIBの活用
ublox-RINEX変換から可視化まで |

|
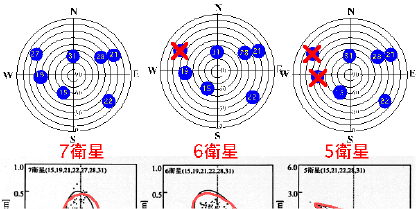
GNSS測位の誤差要因 衛星クロック誤差や軌道誤差
GNSS測位を阻む代表的な誤差要因 |

|
RTKLIBによる後解析キネマティック測位
GNSS測位のデータ処理 |

|
相対測位による誤差の相殺メカニズム
cm級測位のための相対測位 |
|
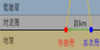
電離層・対流圏遅延の相殺
cm級の精密測位を支える相対測位 |

|
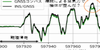
遠方にある基準局との間でも高いFIX率
後処理キネマティック解析 |

|
GPS衛星からの信号は光より遅い
電離層や大気圏の影響 |
|
GNSSコンパスとINSによる方位角推定の比較
GNSSコンパスで真北を捉える |

|
移動基地局方式による飛行機搭載GNSSコンパス
2台のアンテナとレシーバを搭載 |

|
GNSS測位方式のいろいろ
単独/相対/搬送波/スタティック/キネマティック |

|
高精度GNSSコンパス 飛行機への実装
リアルタイム処理 vs 後処理 |

|
GNSSコンパスとIMU,それぞれの姿勢角測定特性
姿勢角測定に向くのは? |

|
GNSSコンパスによる飛行機の姿勢角推定
0.4°精度GNSSコンパスの実験と製作 |

|
RTKからMADOCAまで衛星測位方式の整理
「RTKからMADOCAまで衛星測位方式の整理」の解説ページです |

|
位置補正信号を放送中 準天頂衛星QZSSとは
準天頂衛星QZSSとは |

|
2つの補強放送 CLASとMADOCA
単独高精度測位 みちびき補正信号CLAS入門 |

|
補強放送CLASチャネル“L6”
単独高精度測位 みちびき補正信号CLAS入門 |

|
ROS×ラズパイ SLAMロボット入門
地図作成ロボットの起動バッチ・プログラム |
|
初めてのラズパイ×ROS SLAMロボット開発
GmappingによるLiDARの測定レンジ設定 |
|
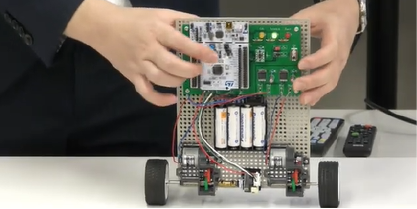
MATLAB/Simulink入門 ADCを読んでLED制御
コードレス・プログラミング環境 Simulinkでモデルベース設計 |

|
MATLAB/Simulink入門 なぜ,MATLABのか
演算に特化!C言語より簡単記述&高速処理 |

|
Matlab/Simulink入門 センサ計測値の信号処理
ライン・トレース・ロボットの目を作る |
|
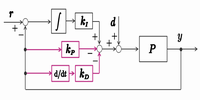
MATLAB/Simulink入門 ON/OFF制御 vs PID制御
誤差の多いBang Bang制御の誤差を改善 |

|
ドローン制御工学入門 M5Stamp Flyの傾き角推定
カルマン・フィルタの軽量版「マドウイック・フィルタ」を採用 |

|
飛行制御ファーム無料!2万円ドローンM5Stamp Fly誕生
安全性good!制御工学教材に最適 |

|
センチメートルRTK測位入門3 高感度アクティブ・アンテナの扱い
-130~-160dBmの衛星電波を確実に受信するために |

|
センチ・メートルRTK測位入門2 M5F9P入門キットの実演
NMEA単独測位の実機デモンストレーション |

|
センチメートルRTK測位入門1 M5F9Pキットの始め方
ファームの書き込みと実機デモンストレーション |
|
3次元LiDARとIMUを用いたSLAM/位置推定
センサ・フュージョンによる高精度追跡 |

|
軒下でも安定測位 2周波RTK GNSSによるcm測位
GNSSレシーバ u-blox ZED-F9Pの実力 |

|
M5Stamp Flyドローンのブレを軽減する2つのセンサ
垂直はToF,水平はオプティカル・フロー・センサ |

|
M5Stamp Flyドローンのブレを安定化する2つのセンサ
垂直はToF,水平はオプティカル・フロー・センサ |

|
カルマン・フィルタによるGPS測位精度向上 要点10
IMUで補完!GNSS電波圏外で正しく測位する技術 |

|
方位精度0.4°!cm測位!高精度GNSSコンパス開発
人力飛行機に搭載!慣性航法装置 INSとGNSSの複合航法装置への応用 |
|
|
$50ドローン・キット“M5Stamp Fly”の制御プログラミング
クアッドコプタの運動原理 |

|
SLAMロボット入門 部屋の形をLiDAR計測
地図アプリRViで測距値を確認 |

|
多関節アームの操作に!状態フィードバック制御入門
数学からモデリベース設計まで,学ぶべきことの全体像 |
|
ロボティクス入門 現実にモデルを近付ける
理想に「不確かさ」を足す |
|
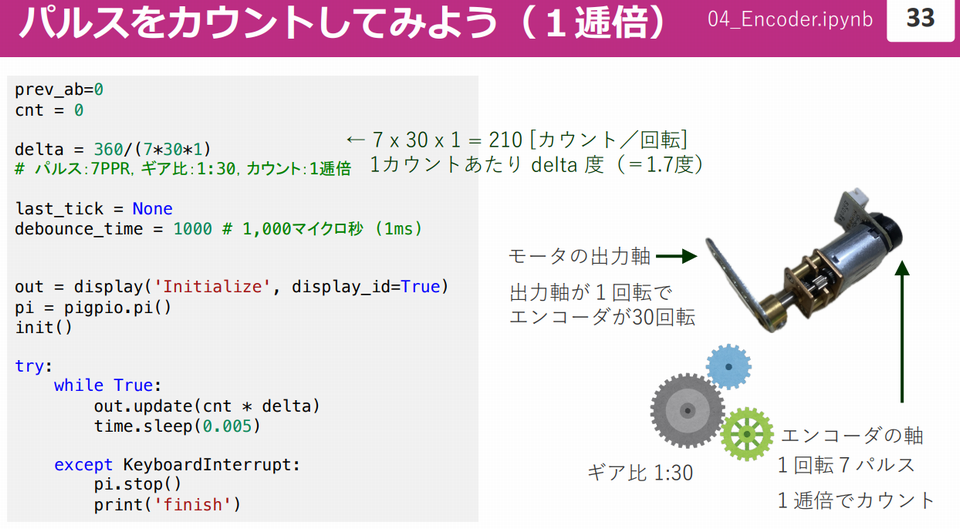
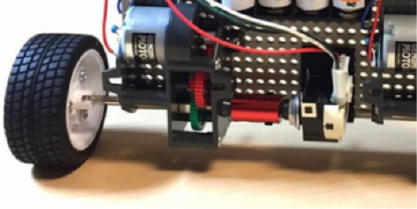
ロボティクス入門 エンコーダで回転を測る
回転方向/角度/速度を測る最重要センサ |

|
ロバスト制御のモデリング 実物との差分の表現
「ロバスト制御のモデリング 実物との差分の表現」の解説ページです |

|
センチ・メートル測位技術"RTK"の始め方
基準局から誤差情報を受信して,移動局の位置を高精度補正 |

|
宇宙ロケットの高セキュア&エラー・レス通信技術
極めて確率の高いエラー訂正技術と高度なサイバ対策 |

|
[YouTube]LiDAR×ROSで作る地図作成ロボット 自動運転の技術を製作とプログラミングで学ぶ[企画・制作]ZEPエンジニアリング |
|
カルマン・フィルタ搭載倒立振子 “MZIP-01”
物理法則にもとづくモデルをマイコンに組み込んで操縦させる |
VOD教材[視聴無制限]




キット&モジュール

|
確率・統計ロボティクス学習キット MZIP-01
統計処理で姿勢の真値を推定するカルマン・フィルタ搭載の高安定倒立振子 |
|
RTKポータブル・センチメートル測位キット(アンテナ付き)
MZ-M5F9PAll 無人搬送ロボット,車いす,盲人誘導,ドローン,3次元計測に |