ZEPマガジン

|
2025年7月2日号
[電源/電池/パワエレ][半導体/電子部品]
超高スルーレートのSiC/GaNを安全に使う SiC GaN FETの高速ドライブ回路設計 SiCやGaNのFETを安全に高速駆動するためには,誤動作防止のための分離構造,放熱設計に配慮が必要.特にケルビン・ソース端子の適切な扱いは信頼性確保に直結する |
|
2025年7月1日号
[電源/電池/パワエレ][半導体/電子部品]
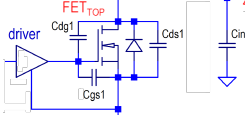
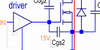
出力容量(Coss)が効率を悪化させる SiC GaN FETの高速ドライブ回路設計 $C_{oss}$によりスイッチング時にエネルギが蓄積され,その蓄積エネルギはスイッチ動作時に損失として消費される.容量値の大きい素子を選ぶと,高速スイッチングにおいて不利に働く |
|
2025年6月30日号
[電源/電池/パワエレ][半導体/電子部品]
SiC化による逆回復損失の低減 SiC GaN FETの高速ドライブ回路設計 SiC MOSFETではボディ・ダイオードの構造上,$Q_{rr}$は1桁から2桁小さく,おおよそ1/100の損失に抑えられる.ハード・スイッチングでも大きな損失を伴わずに高効率を維持できる |
|
2025年6月29日号
[電源/電池/パワエレ][半導体/電子部品]
電流連続モード設計が容易に!低Qrr SiC MOSFET SiC GaN FETの高速ドライブ回路設計 Qrrは高周波スイッチング回路の効率と信頼性を左右する重要な因子.SiC MOSFETによってこの損失を抑えられることで,設計の自由度が高まり,電源回路の性能と信頼性が向上する |

|
2025年6月28日号
[電源/電池/パワエレ][半導体/電子部品]
SiC GaN FETの高速ドライブ回路設計 SiC GaN FETの高速ドライブ回路設計 車載のオンボード・チャージャを構成するPFC回路やLLC共振コンバータなどの高周波駆動が求められるブロックに,SiCやGaNといったワイドバンド・ギャップ半導体が導入されつつある |
|
2025年6月27日号
[電源/電池/パワエレ][半導体/電子部品]
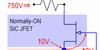
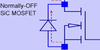
Si FETとJFETを縦積み!カスコード型 GAN FET SiC GaN FETの高速ドライブ回路設計 SiC JFETとSi MOSFETを縦に組み合わせたカスコード構成は,ノーマリ・オン特性を扱いやすくし,ノーマリ・オフのような挙動を可能にする |
|
2025年6月26日号
[電源/電池/パワエレ][半導体/電子部品]
GaN MOSFETの構造 SiC GaN FETの高速ドライブ回路設計 GaN MOSFETの高速スイッチングを活かすためには寄生インダクタンスを抑えるレイアウトとデッドタイムの管理が重要 |

|
2025年6月25日号
[電源/電池/パワエレ][半導体/電子部品]
SiCはSiの耐圧100倍,放熱効率3倍 SiC GaN FETの高速ドライブ回路設計 SiC(炭化ケイ素)MOSFETは,シリコン(Si)ベースのMOSFETに比べて,同じドリフト層の厚さでも約30?40倍の耐圧が得られる特性をもつ |
|
2025年6月24日号
[電源/電池/パワエレ][半導体/電子部品]
SiからGaN SiCまで!MOSFETの耐圧とオン抵抗 SiC GaN FETの高速ドライブ回路設計 SiC(炭化ケイ素)は700Vから1200V,さらには1700V以上の高耐圧領域で普及が進んでいる.電気自動車や産業用インバータ向けに開発が進んでいる |
|
2025年6月23日号
[電源/電池/パワエレ][半導体/電子部品]
GaNは横型,SiCは縦型 SiC GaN FETの高速ドライブ回路設計 現在のGaNは,GaN on Siliconという形で横型のプロセスを採用.電子の流れが基板に対して平行方向に進むため,微細化によるスイッチング速度アップが可能 |

|
2025年6月22日号
[電源/電池/パワエレ][半導体/電子部品]
スーパージャンクションMOSFET 高耐圧特性の理由 SiC GaN FETの高速ドライブ回路設計 スーパージャンクションMOSFETは,P柱を利用した電界制御により,ドリフト層の厚みや抵抗を増やすことなく,高耐圧化と低オン抵抗を両立している |

|
2025年6月21日号
[電源/電池/パワエレ][半導体/電子部品]
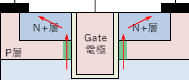
Si MOSFET内部の電流経路 SiC GaN FETの高速ドライブ回路設計 パワーMOSFETは縦型プレーナ構造をもち,電流はソース(S)からドレイン(D)へ,シリコン基板の厚み方向に流れる |

|
2025年6月20日号
[基板/実装/3Dプリンタ]
部品内蔵型基板は2種類ある 高密度プリント基板のテクノロジ 内蔵基板は2種類.1つはリアルな個別抵抗やキャパシタなどのチップ部品を物理的に埋め込む方式,もう1つは部品機能自体を基板構造の中で再現する方式 |

|
2025年6月19日号
[基板/実装/3Dプリンタ]
ビアにレジストはNG 中途半端なレジスト被覆は避ける ビアの処理は,プリント基板の長期的な信頼性に直結する.中途半端なレジスト被覆は避け,完全な貫通か埋め処理のどちらかに統一すべき |

|
2025年6月18日号
[基板/実装/3Dプリンタ]
正しい「絶縁」信頼性の試験 プリント基板 10の見極め方と検査術 絶縁信頼性の評価には,温湿度環境での加速試験や電圧印加が有効.評価対象となるクーポンの選定や設計構造に応じた層別試験を行うことで,基板全体の絶縁品質を適切に判断できる |

|
2025年6月17日号
[基板/実装/3Dプリンタ]
正しい「導通」信頼性の試験 プリント基板 10の見極め方と検査術 「導通性テスト」は,初期検査だけでなく,長期的な安定性を見据えた試験が必要.経年劣化を短期間で再現する熱衝撃試験などの加速試験を行うべき |
|
2025年6月16日号
[基板/実装/3Dプリンタ]
スルーホール断面に潜む不良 プリント基板 10の見極め方と検査術 長期信頼性に直結する樹脂ミアやウィッキング,ボイドなど微細な欠陥はスルーホールの断面からわかる |

|
2025年6月15日号
[基板/実装/3Dプリンタ]
導通と絶縁がプリント基板の信頼性 プリント基板 10の見極め方と検査術 抵抗値が中途半端な状態や経時変化する現象は,電気検査では検出が難しい.破壊検査によるマイクロレベルの確認が必要 |
|
2025年6月14日号
[AI/IoT/マイコン][アナログ/センサ/計測]
WebブラウザでI/O!Androidスマホで作る計測制御デバイス MIT App Inventor2×Pico W!WiFi温湿度計をノーコード制作 無料のブロック・プログラミング環境 MIT App Inventor2と,低価格マイコン Pico Wの組み合わせで,ノーコードでIoTデバイスの制御アプリをスピーディに開発できる |

|
2025年6月13日号
[電源/電池/パワエレ][モータ/アクチュエータ][ノイズ/放熱対策]
シミュレータはベテランになってから使うツール 壊れない!壊さない!失敗だらけの電源・インバータ設計 正しくシミュレーションするためには,デバイス・モデルやPWMパターンの精度や発熱や冷却条件を含めた熱モデルが必要.使いこなすには十分な経験と知識が必要 |